 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-task Learning for Monocular Depth and Defocus Estimations with Real Images
Aug 21, 2022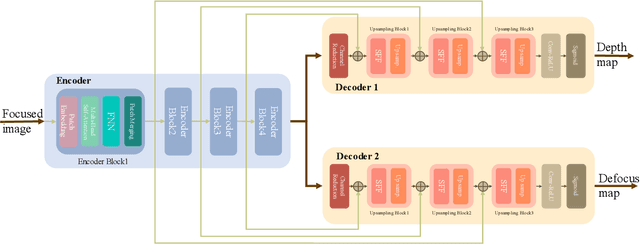
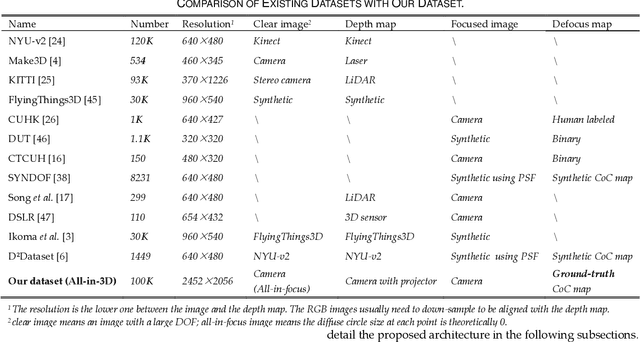
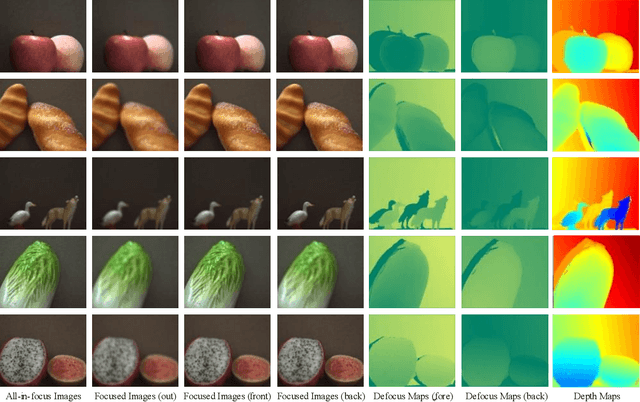
Monocular depth estimation and defocus estimation are two fundamental tasks in computer vision. Most existing methods treat depth estimation and defocus estimation as two separate tasks, ignoring the strong connection between them. In this work, we propose a multi-task learning network consisting of an encoder with two decoders to estimate the depth and defocus map from a single focused image. Through the multi-task network, the depth estimation facilitates the defocus estimation to get better results in the weak texture region and the defocus estimation facilitates the depth estimation by the strong physical connection between the two maps. We set up a dataset (named ALL-in-3D dataset) which is the first all-real image dataset consisting of 100K sets of all-in-focus images, focused images with focus depth, depth maps, and defocus maps. It enables the network to learn features and solid physical connections between the depth and real defocus images. Experiments demonstrate that the network learns more solid features from the real focused images than the synthetic focused images. Benefiting from this multi-task structure where different tasks facilitate each other, our depth and defocus estimations achieve significantly better performance than other state-of-art algorithms. The code and dataset will be publicly available at https://github.com/cubhe/MDDNet.
Precise Point Spread Function Estimation
Mar 06, 2022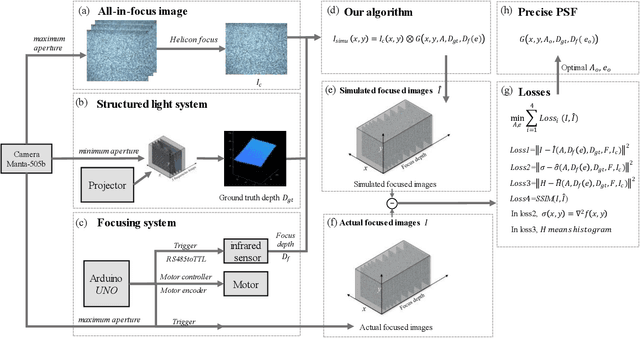

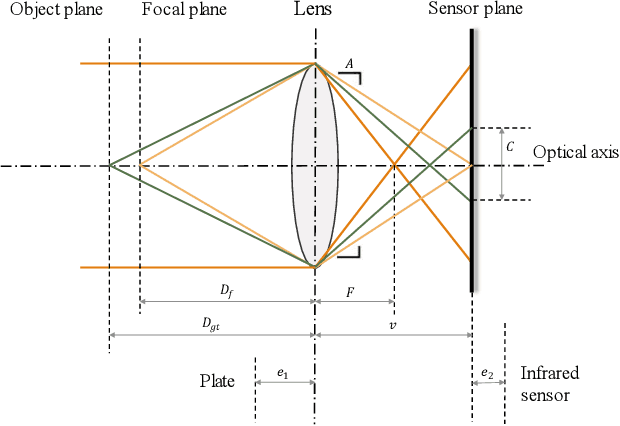
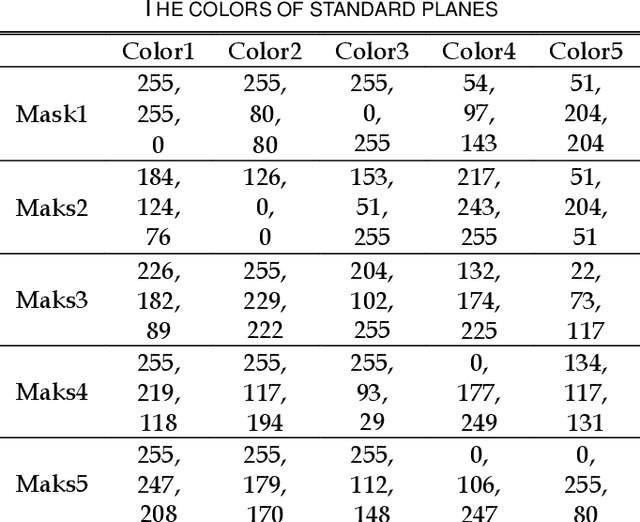
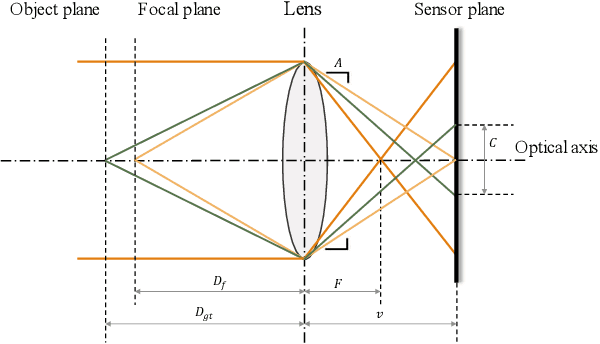
Point spread function (PSF) plays a crucial role in many fields, such as shape from focus/defocus, depth estimation, and imaging process in fluorescence microscopy. However, the mathematical model of the defocus process is still unclear because several variables in the point spread function are hard to measure accurately, such as the f-number of cameras, the physical size of a pixel, the focus depth, etc. In this work, we develop a precise mathematical model of the camera's point spread function to describe the defocus process. We first derive the mathematical algorithm for the PSF and extract two parameters A and e. A is the composite of camera's f-number, pixel-size, output scale, and scaling factor of the circle of confusion; e is the deviation of the focus depth. We design a novel metric based on the defocus histogram to evaluate the difference between the simulated focused image and the actual focused image to obtain optimal A and e. We also construct a hardware system consisting of a focusing system and a structured light system to acquire the all-in-focus image, the focused image with corresponding focus depth, and the depth map in the same view. The three types of images, as a dataset, are used to obtain the precise PSF. Our experiments on standard planes and actual objects show that the proposed algorithm can accurately describe the defocus process. The accuracy of our algorithm is further proved by evaluating the difference among the actual focused images, the focused image generated by our algorithm, the focused image generated by others. The results show that the loss of our algorithm is 40% less than others on average. The dataset, code, and model are available on GitHub: https://github.com/cubhe/ precise-point-spread-function-estimation.