 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsemble Bayesian Decision Making with Redundant Deep Perceptual Control Policies
Feb 19, 2019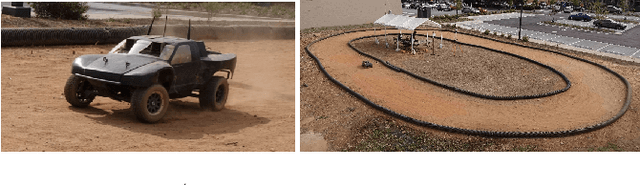
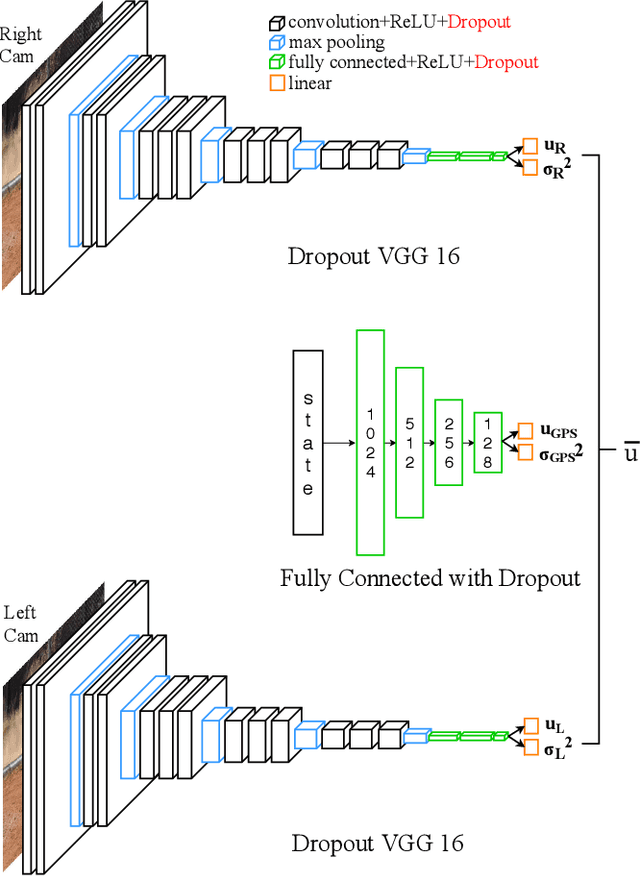
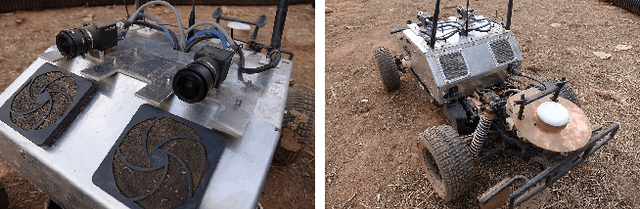
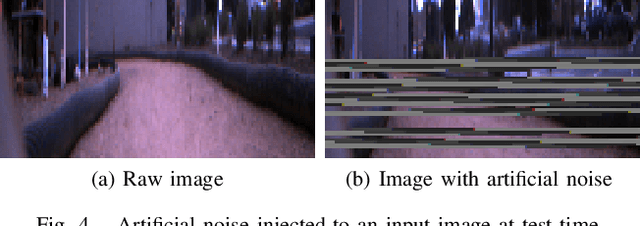
This work presents a novel ensemble of Bayesian Neural Networks (BNNs) for control of safety-critical systems. Decision making for safety-critical systems is challenging due to performance requirements with significant consequences in the event of failure. In practice, failure of such systems can be avoided by introducing redundancies of control. Neural Networks (NNs) are generally not used for safety-critical systems as they can behave in unexpected ways in response to novel inputs. In addition, there may not be any indication as to when they will fail. BNNs have been recognized for their ability to produce not only viable outputs but also provide a measure of uncertainty in these outputs. This work combines the knowledge of prediction uncertainty obtained from BNNs and ensemble control for a redundant control methodology. Our technique is applied to an agile autonomous driving task. Multiple BNNs are trained to control a vehicle in an end-to-end fashion on different sensor inputs provided by the system. We show that an individual network is successful in maneuvering around the track but crashes in the presence of unforeseen input noise. Our proposed ensemble of BNNs shows successful task performance even in the event of multiple sensor failures.