 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous close-range 3D object pose estimation
Oct 02, 2020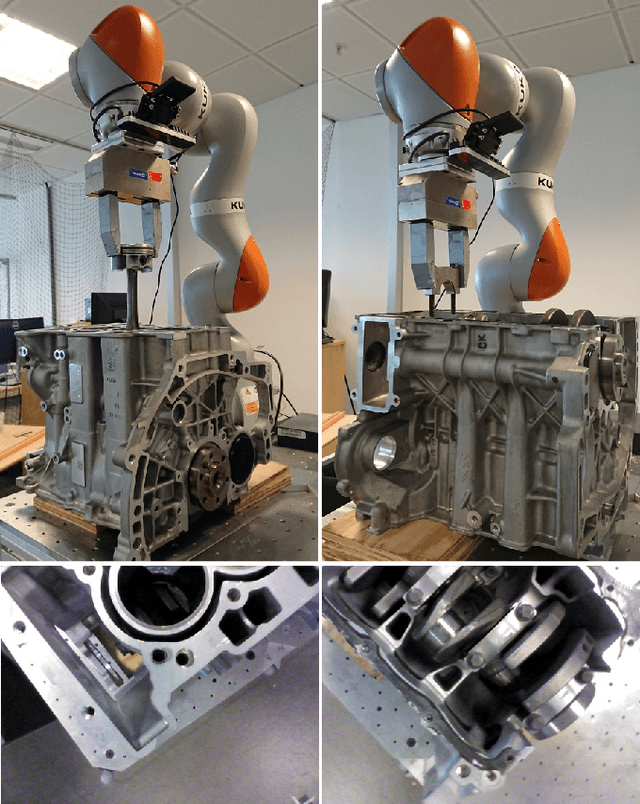
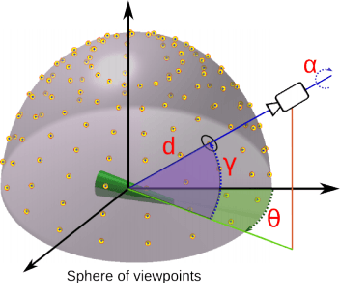
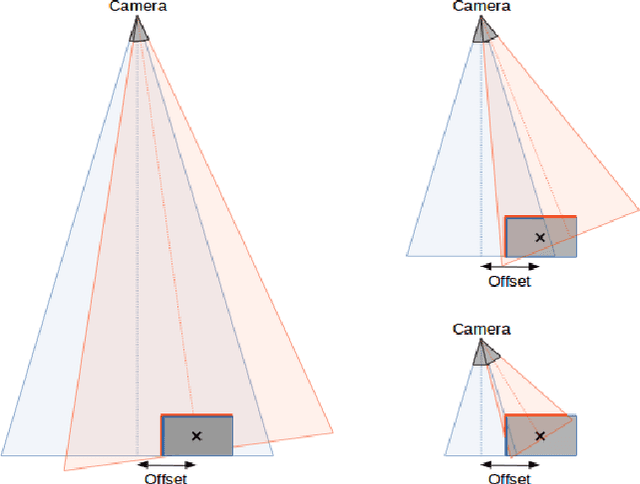
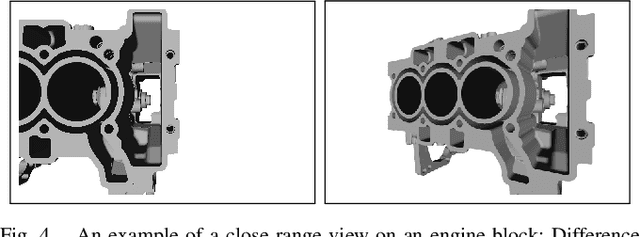
In the context of future manufacturing lines, removing fixtures will be a fundamental step to increase the flexibility of autonomous systems in assembly and logistic operations. Vision-based 3D pose estimation is a necessity to accurately handle objects that might not be placed at fixed positions during the robot task execution. Industrial tasks bring multiple challenges for the robust pose estimation of objects such as difficult object properties, tight cycle times and constraints on camera views. In particular, when interacting with objects, we have to work with close-range partial views of objects that pose a new challenge for typical view-based pose estimation methods. In this paper, we present a 3D pose estimation method based on a gradient-ascend particle filter that integrates new observations on-the-fly to improve the pose estimate. Thereby, we can apply this method online during task execution to save valuable cycle time. In contrast to other view-based pose estimation methods, we model potential views in full 6- dimensional space that allows us to cope with close-range partial objects views. We demonstrate the approach on a real assembly task, in which the algorithm usually converges to the correct pose within 10-15 iterations with an average accuracy of less than 8mm.
Continuous hand-eye calibration using 3D points
Apr 27, 2020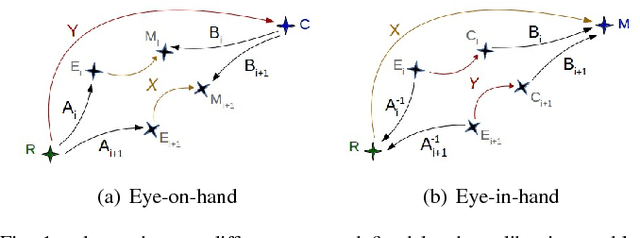
The recent development of calibration algorithms has been driven into two major directions: (1) an increasing accuracy of mathematical approaches and (2) an increasing flexibility in usage by reducing the dependency on calibration objects. These two trends, however, seem to be contradictory since the overall accuracy is directly related to the accuracy of the pose estimation of the calibration object and therefore demanding large objects, while an increased flexibility leads to smaller objects or noisier estimation methods. The method presented in this paper aims to resolves this problem in two steps: First, we derive a simple closed-form solution with a shifted focus towards the equation of translation that only solves for the necessary hand-eye transformation. We show that it is superior in accuracy and robustness compared to traditional approaches. Second, we decrease the dependency on the calibration object to a single 3D-point by using a similar formulation based on the equation of translation which is much less affected by the estimation error of the calibration object's orientation. Moreover, it makes the estimation of the orientation obsolete while taking advantage of the higher accuracy and robustness from the first solution, resulting in a versatile method for continuous hand-eye calibration.