 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Deep Learning Framework for Emotion Recognition in Children with Autism During NAO Robot-Mediated Interaction
Dec 13, 2025Understanding emotional responses in children with Autism Spectrum Disorder (ASD) during social interaction remains a critical challenge in both developmental psychology and human-robot interaction. This study presents a novel deep learning pipeline for emotion recognition in autistic children in response to a name-calling event by a humanoid robot (NAO), under controlled experimental settings. The dataset comprises of around 50,000 facial frames extracted from video recordings of 15 children with ASD. A hybrid model combining a fine-tuned ResNet-50-based Convolutional Neural Network (CNN) and a three-layer Graph Convolutional Network (GCN) trained on both visual and geometric features extracted from MediaPipe FaceMesh landmarks. Emotions were probabilistically labeled using a weighted ensemble of two models: DeepFace's and FER, each contributing to soft-label generation across seven emotion classes. Final classification leveraged a fused embedding optimized via Kullback-Leibler divergence. The proposed method demonstrates robust performance in modeling subtle affective responses and offers significant promise for affective profiling of ASD children in clinical and therapeutic human-robot interaction contexts, as the pipeline effectively captures micro emotional cues in neurodivergent children, addressing a major gap in autism-specific HRI research. This work represents the first such large-scale, real-world dataset and pipeline from India on autism-focused emotion analysis using social robotics, contributing an essential foundation for future personalized assistive technologies.
A Hybrid Technique for Plant Disease Identification and Localisation in Real-time
Dec 27, 2024



Over the past decade, several image-processing methods and algorithms have been proposed for identifying plant diseases based on visual data. DNN (Deep Neural Networks) have recently become popular for this task. Both traditional image processing and DNN-based methods encounter significant performance issues in real-time detection owing to computational limitations and a broad spectrum of plant disease features. This article proposes a novel technique for identifying and localising plant disease based on the Quad-Tree decomposition of an image and feature learning simultaneously. The proposed algorithm significantly improves accuracy and faster convergence in high-resolution images with relatively low computational load. Hence it is ideal for deploying the algorithm in a standalone processor in a remotely operated image acquisition and disease detection system, ideally mounted on drones and robots working on large agricultural fields. The technique proposed in this article is hybrid as it exploits the advantages of traditional image processing methods and DNN-based models at different scales, resulting in faster inference. The F1 score is approximately 0.80 for four disease classes corresponding to potato and tomato crops.
Autonomous Navigation of 4WIS4WID Agricultural Field Mobile Robot using Deep Reinforcement Learning
Dec 25, 2024In the futuristic agricultural fields compatible with Agriculture 4.0, robots are envisaged to navigate through crops to perform functions like pesticide spraying and fruit harvesting, which are complex tasks due to factors such as non-geometric internal obstacles, space constraints, and outdoor conditions. In this paper, we attempt to employ Deep Reinforcement Learning (DRL) to solve the problem of 4WIS4WID mobile robot navigation in a structured, automated agricultural field. This paper consists of three sections: parameterization of four-wheel steering configurations, crop row tracking using DRL, and autonomous navigation of 4WIS4WID mobile robot using DRL through multiple crop rows. We show how to parametrize various configurations of four-wheel steering to two variables. This includes symmetric four-wheel steering, zero-turn, and an additional steering configuration that allows the 4WIS4WID mobile robot to move laterally. Using DRL, we also followed an irregularly shaped crop row with symmetric four-wheel steering. In the multiple crop row simulation environment, with the help of waypoints, we effectively performed point-to-point navigation. Finally, a comparative analysis of various DRL algorithms that use continuous actions was carried out.
A Novel Approach to Tomato Harvesting Using a Hybrid Gripper with Semantic Segmentation and Keypoint Detection
Dec 21, 2024Current agriculture and farming industries are able to reap advancements in robotics and automation technology to harvest fruits and vegetables using robots with adaptive grasping forces based on the compliance or softness of the fruit or vegetable. A successful operation depends on using a gripper that can adapt to the mechanical properties of the crops. This paper proposes a new robotic harvesting approach for tomato fruit using a novel hybrid gripper with a soft caging effect. It uses its six flexible passive auxetic structures based on fingers with rigid outer exoskeletons for good gripping strength and shape conformability. The gripper is actuated through a scotch-yoke mechanism using a servo motor. To perform tomato picking operations through a gripper, a vision system based on a depth camera and RGB camera implements the fruit identification process. It incorporates deep learning-based keypoint detection of the tomato's pedicel and body for localization in an occluded and variable ambient light environment and semantic segmentation of ripe and unripe tomatoes. In addition, robust trajectory planning of the robotic arm based on input from the vision system and control of robotic gripper movements are carried out for secure tomato handling. The tunable grasping force of the gripper would allow the robotic handling of fruits with a broad range of compliance.
An anthropomorphic continuum robotic neck actuated by SMA spring-based multipennate muscle architecture
Sep 07, 2023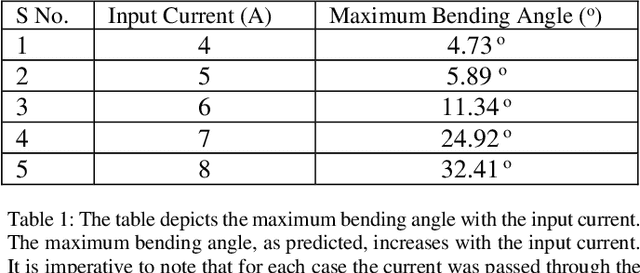
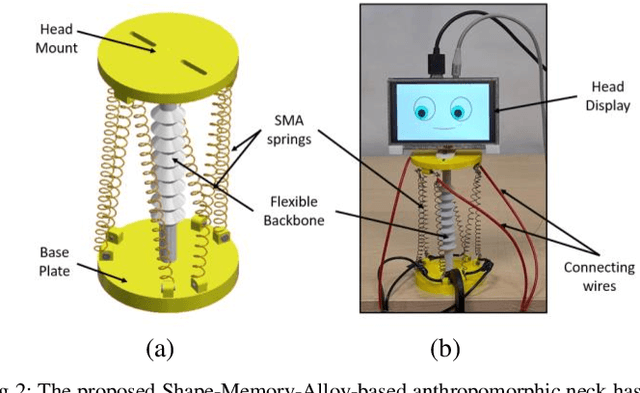
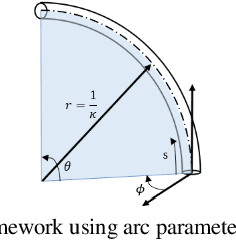
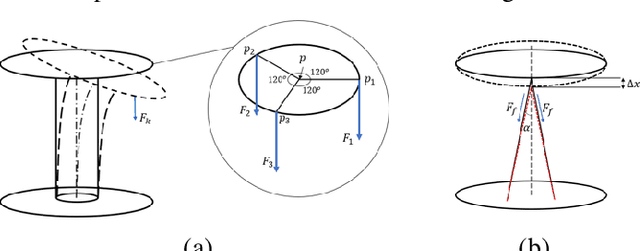
This work presents a novel Shape Memory Alloy spring actuated continuum robotic neck that derives inspiration from pennate muscle architecture. The proposed design has 2DOF, and experimental studies reveal that the designed joint can replicate the human head's anthropomorphic range of motion. We enumerate the analytical modelling for SMA actuators and the kinematic model of the proposed design configuration. A series of experiments were conducted to assess the performance of the anthropomorphic neck by measuring the range of motion with varying input currents. Furthermore, the experiments were conducted to validate the analytical model of the SMA Multiphysics and the continuum backbone. The existing humanoid necks have been powered by conventional actuators that have relatively low energy efficiency and are prone to wear. The current research envisages application of nonconventional actuator such as SMA springs with specific geometric configuration yielding high power to weight ratio that delivers smooth motion for continuum robots as demonstrated in this present work.