 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Grossberg Code: Universal Neural Network Signatures of Perceptual Experience
Mar 03, 2023Two universal functional principles of Adaptive Resonance Theory simulate the brain code of all biological learning and adaptive intelligence. Low level representations of multisensory stimuli in their immediate environmental context are formed on the basis of bottom up activation and under the control of top down matching rules that integrate high level long term traces of contextual configuration. These universal coding principles lead to the establishment of lasting brain signatures of perceptual experience in all living species, from aplysiae to primates. They are revisited in this paper here on the basis of examples drawn from the original code and from some of the most recent related empirical findings on contextual modulation in the brain, highlighting the potential of Grossberg's pioneering insights and groundbreaking theoretical work for intelligent solutions in the domain of developmental and cognitive robotics.
Spatiotemporal modeling of grip forces captures proficiency in manual robot control
Mar 03, 2023



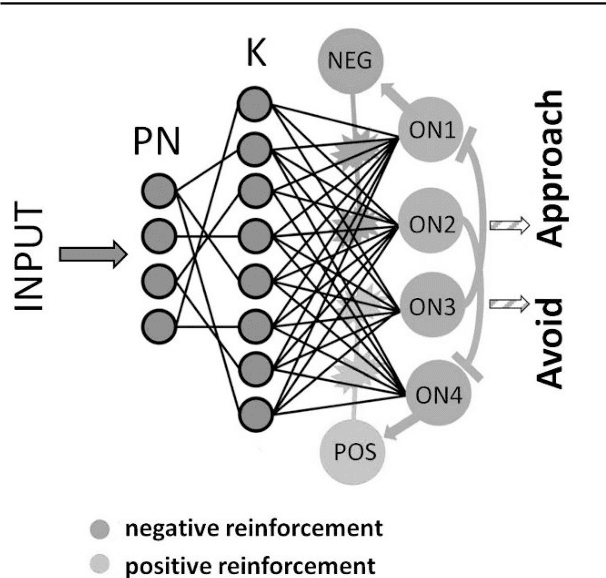
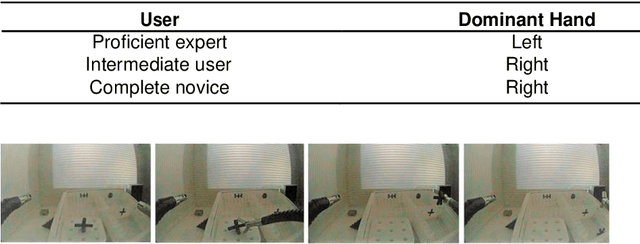
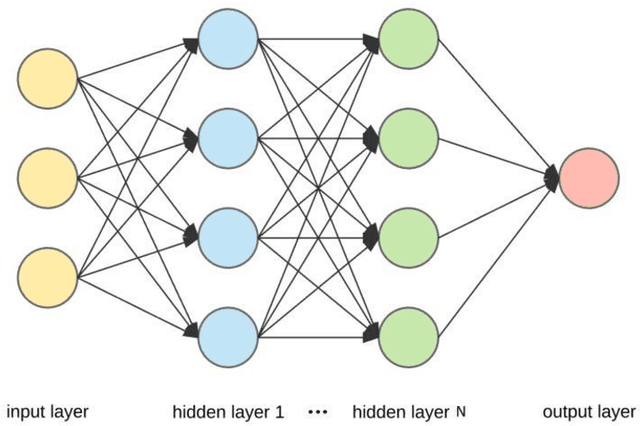
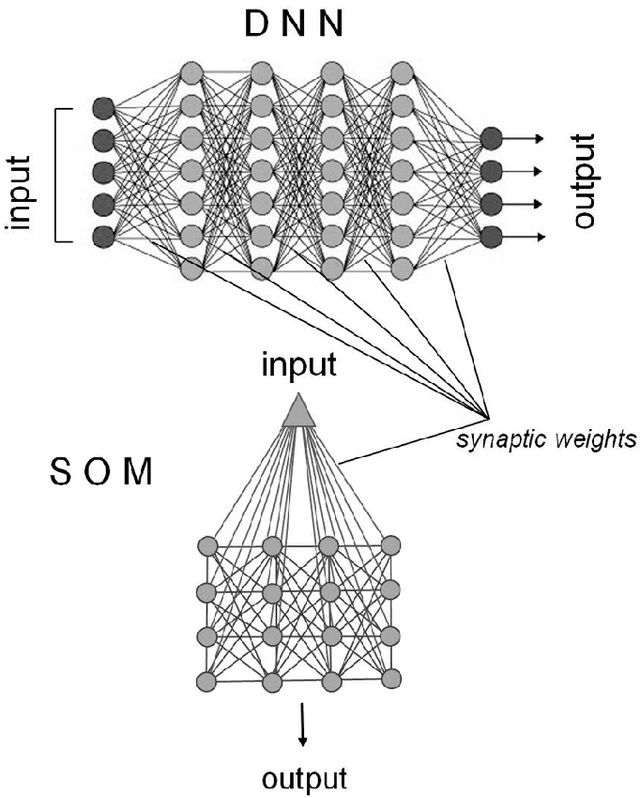
This paper builds on our previous work by exploiting Artificial Intelligence to predict individual grip force variability in manual robot control. Grip forces were recorded from various loci in the dominant and non dominant hands of individuals by means of wearable wireless sensor technology. Statistical analyses bring to the fore skill specific temporal variations in thousands of grip forces of a complete novice and a highly proficient expert in manual robot control. A brain inspired neural network model that uses the output metric of a Self Organizing Map with unsupervised winner take all learning was run on the sensor output from both hands of each user. The neural network metric expresses the difference between an input representation and its model representation at any given moment in time t and reliably captures the differences between novice and expert performance in terms of grip force variability.Functionally motivated spatiotemporal analysis of individual average grip forces, computed for time windows of constant size in the output of a restricted amount of task-relevant sensors in the dominant (preferred) hand, reveal finger-specific synergies reflecting robotic task skill. The analyses lead the way towards grip force monitoring in real time to permit tracking task skill evolution in trainees, or identify individual proficiency levels in human robot interaction in environmental contexts of high sensory uncertainty. Parsimonious Artificial Intelligence (AI) assistance will contribute to the outcome of new types of surgery, in particular single-port approaches such as NOTES (Natural Orifice Transluminal Endoscopic Surgery) and SILS (Single Incision Laparoscopic Surgery).
Information And Control: Insights from within the brain
Jun 09, 2022

The neural networks of the brain are capable of learning statistical input regularities on the basis of synaptic learning, functional integration into increasingly larger, interconnected neural assemblies, and self organization. This self organizing ability has implications for biologically inspired control structures in robotics. On the basis of signal input from vision, sound, smell, touch and proprioception, multisensory representations for action are generated on the basis of physically specified input from the environment. The somatosensory cortex is a brain hub that delivers a choice example of integration for multifunctional representation and control. All sensory information is in a first instance topologically represented in the biological brain, and thereafter integrated in somatosensory neural networks for multimodal and multifunctional control of complex behaviors. Multisignal input triggers interactions between visual, auditory, tactile, olfactive, and proprioceptive mechanisms, which cooperate or compete during learning, and contribute to the formation of integrated representations for action, reflection, and communication between the agent and the outside world. Interaction fuels complex behavioral strategy deployment and further learning for increasingly coherent representation of intrinsically ambiguous physical environments.
From Biological Synapses to Intelligent Robots
Feb 25, 2022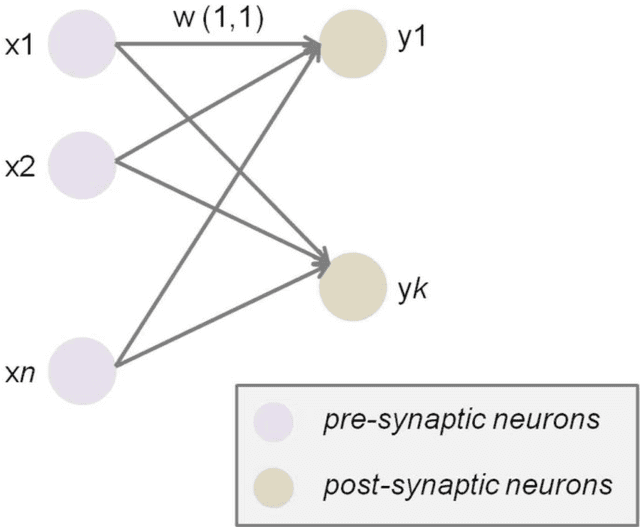
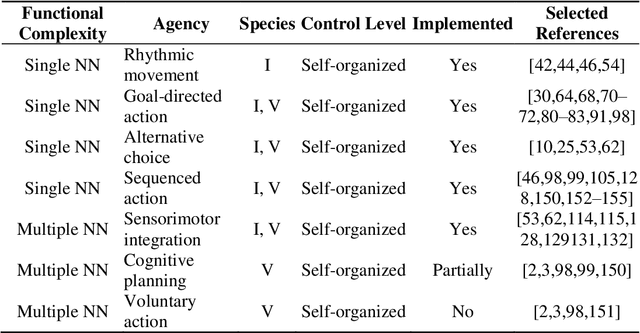
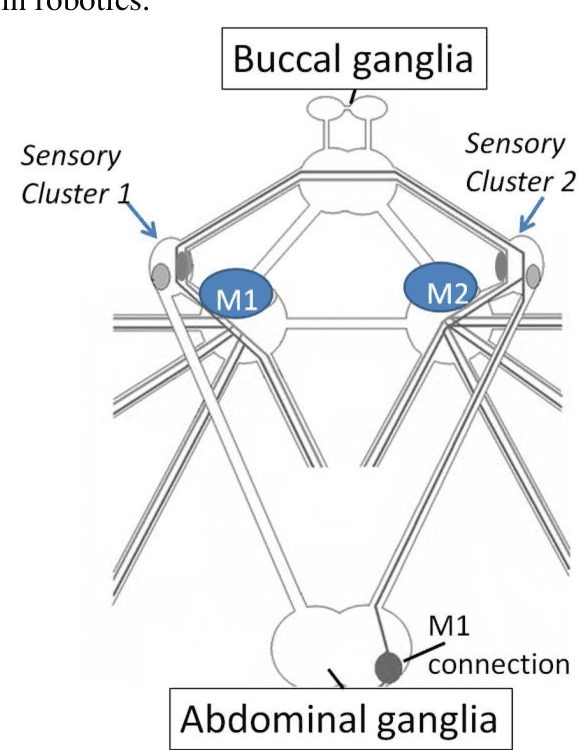
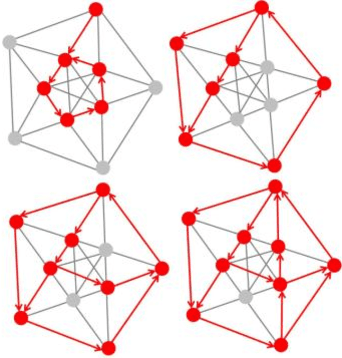
This review explores biologically inspired learning as a model for intelligent robot control and sensing technology on the basis of specific examples. Hebbian synaptic learning is discussed as a functionally relevant model for machine learning and intelligence, as explained on the basis of examples from the highly plastic biological neural networks of invertebrates and vertebrates. Its potential for adaptive learning and control without supervision, the generation of functional complexity, and control architectures based on self organization is brought forward. Learning without prior knowledge based on excitatory and inhibitory neural mechanisms accounts for the process through which survival or task relevant representations are either reinforced or suppressed. The basic mechanisms of unsupervised biological learning drive synaptic plasticity and adaptation for behavioral success in living brains with different levels of complexity. The insights collected here point toward the Hebbian model as a choice solution for intelligent robotics and sensor systems. Keywords: Hebbian learning, synaptic plasticity, neural networks, self organization, brain, reinforcement, sensory processing, robot control
Making Sense of Complex Sensor Data Streams
Jun 17, 2021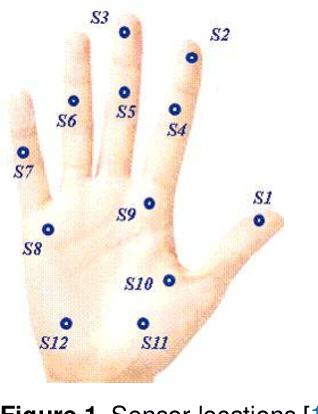
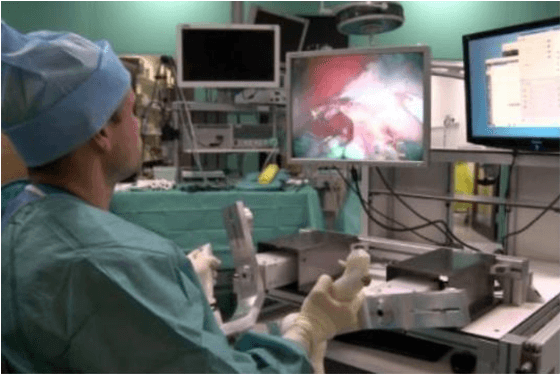

This concept paper draws from our previous research on individual grip force data collected from biosensors placed on specific anatomical locations in the dominant and non dominant hands of operators performing a robot assisted precision grip task for minimally invasive endoscopic surgery. The specificity of the robotic system on the one hand, and that of the 2D image guided task performed in a real world 3D space on the other, constrain the individual hand and finger movements during task performance in a unique way. Our previous work showed task specific characteristics of operator expertise in terms of specific grip force profiles, which we were able to detect in thousands of highly variable individual data. This concept paper is focused on two complementary data analysis strategies that allow achieving such a goal. In contrast with other sensor data analysis strategies aimed at minimizing variance in the data, it is in this case here necessary to decipher the meaning of the full extent of intra and inter individual variance in the sensor data by using the appropriate statistical analyses, as shown in the first part of this paper. Then, it is explained how the computation of individual spatio temporal grip force profiles permits detecting expertise specific differences between individual users. It is concluded that these two analytic strategies are complementary. They enable drawing meaning from thousands of biosensor data reflecting human grip performance and its evolution with training, while fully taking into account their considerable inter and intra individual variability.
Surgical task expertise detected by a self-organizing neural network map
Jun 03, 2021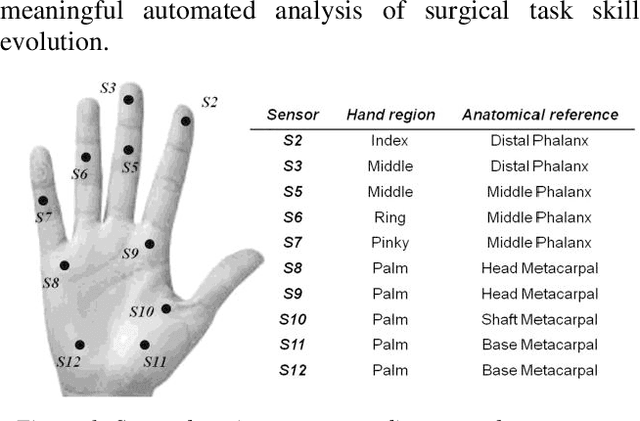
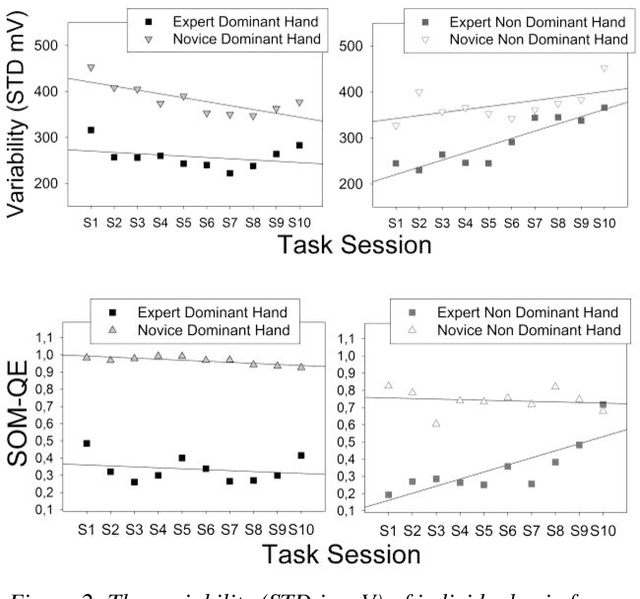
Individual grip force profiling of bimanual simulator task performance of experts and novices using a robotic control device designed for endoscopic surgery permits defining benchmark criteria that tell true expert task skills from the skills of novices or trainee surgeons. Grip force variability in a true expert and a complete novice executing a robot assisted surgical simulator task reveal statistically significant differences as a function of task expertise. Here we show that the skill specific differences in local grip forces are predicted by the output metric of a Self Organizing neural network Map (SOM) with a bio inspired functional architecture that maps the functional connectivity of somatosensory neural networks in the primate brain.
Deep Reinforcement Learning for the Control of Robotic Manipulation: A Focussed Mini-Review
Feb 08, 2021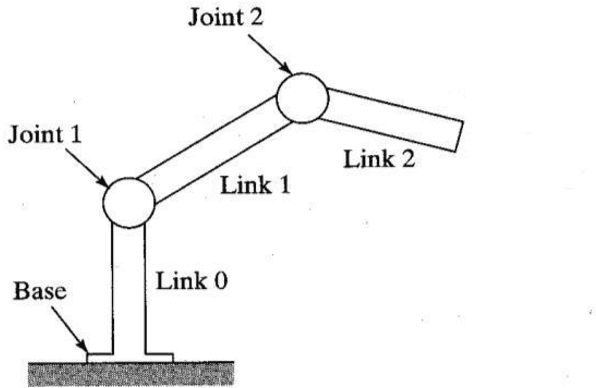
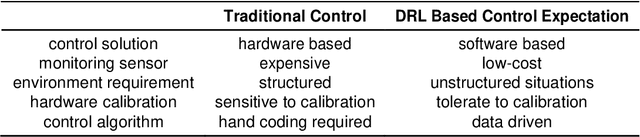

Deep learning has provided new ways of manipulating, processing and analyzing data. It sometimes may achieve results comparable to, or surpassing human expert performance, and has become a source of inspiration in the era of artificial intelligence. Another subfield of machine learning named reinforcement learning, tries to find an optimal behavior strategy through interactions with the environment. Combining deep learning and reinforcement learning permits resolving critical issues relative to the dimensionality and scalability of data in tasks with sparse reward signals, such as robotic manipulation and control tasks, that neither method permits resolving when applied on its own. In this paper, we present recent significant progress of deep reinforcement learning algorithms, which try to tackle the problems for the application in the domain of robotic manipulation control, such as sample efficiency and generalization. Despite these continuous improvements, currently, the challenges of learning robust and versatile manipulation skills for robots with deep reinforcement learning are still far from being resolved for real world applications.
From hand to brain and back: Grip forces deliver insight into the functional plasticity of somatosensory processes
Jan 16, 2021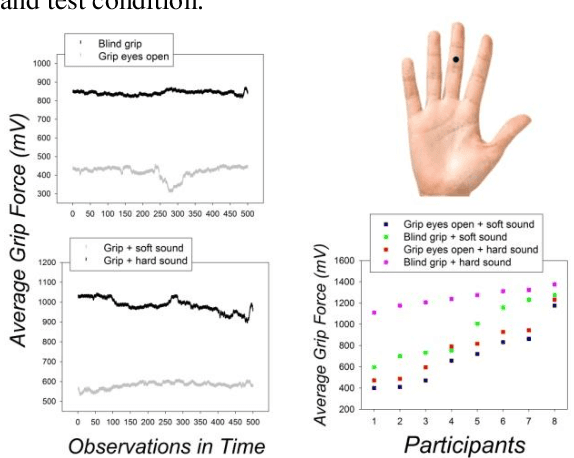
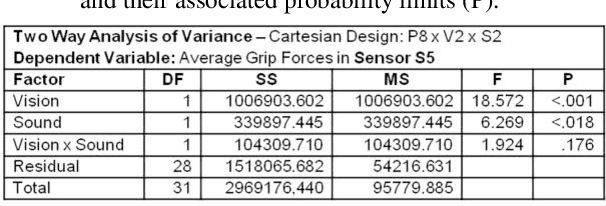
The human somatosensory cortex is intimately linked to other central brain functions such as vision, audition, mechanoreception, and motor planning and control. These links are established through brain learning, and display a considerable functional plasticity. This latter fulfills an important adaptive role and ensures, for example, that humans are able to reliably manipulate and control objects in the physical world under constantly changing conditions in their immediate sensory environment. Variations in human grip force are a direct reflection of this specific kind of functional plasticity. Data from preliminary experiments where wearable wireless sensor technology (sensor gloves) was exploited to measure human grip force variations under varying sensory input conditions (eyes open or shut, soft music or hard music during gripping) are discussed here to show the extent to which grip force sensing permits quantifying somatosensory brain interactions and their functional plasticity. Experiments to take this preliminary work further are suggested. Implications for robotics, in particular the development of end-effector robots for upper limb movement planning and control, are brought forward.
Wearable Sensors for Spatio-Temporal Grip Force Profiling
Jan 16, 2021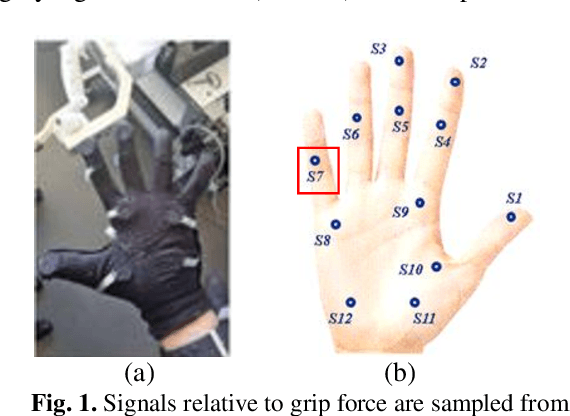

Wearable biosensor technology enables real-time, convenient, and continuous monitoring of users behavioral signals. Such include signals relative to body motion, body temperature, biological or biochemical markers, and individual grip forces, which are studied in this paper. A four step pick and drop image guided and robot assisted precision task has been designed for exploiting a wearable wireless sensor glove system. Individual spatio temporal grip forces are analyzed on the basis of thousands of individual sensor data, collected from different locations on the dominant and non-dominant hands of each of three users in ten successive task sessions. Statistical comparisons reveal specific differences between grip force profiles of the individual users as a function of task skill level (expertise) and time.
Occams Razor for Big Data? On Detecting Quality in Large Unstructured Datasets
Nov 12, 2020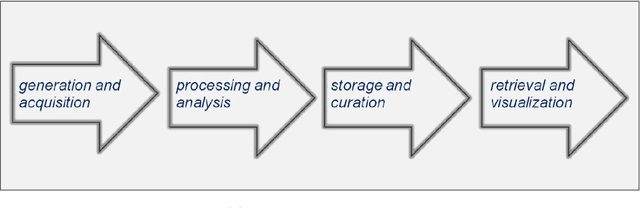
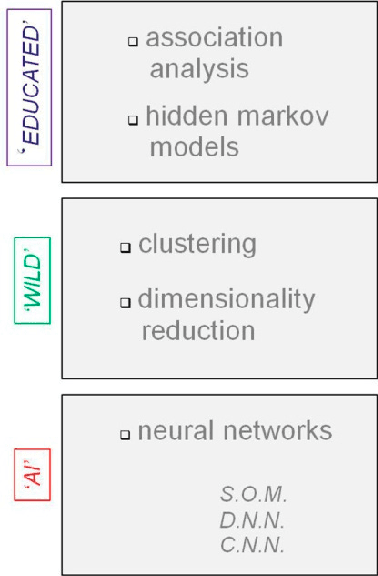

Detecting quality in large unstructured datasets requires capacities far beyond the limits of human perception and communicability and, as a result, there is an emerging trend towards increasingly complex analytic solutions in data science to cope with this problem. This new trend towards analytic complexity represents a severe challenge for the principle of parsimony or Occams Razor in science. This review article combines insight from various domains such as physics, computational science, data engineering, and cognitive science to review the specific properties of big data. Problems for detecting data quality without losing the principle of parsimony are then highlighted on the basis of specific examples. Computational building block approaches for data clustering can help to deal with large unstructured datasets in minimized computation time, and meaning can be extracted rapidly from large sets of unstructured image or video data parsimoniously through relatively simple unsupervised machine learning algorithms. Why we still massively lack in expertise for exploiting big data wisely to extract relevant information for specific tasks, recognize patterns, generate new information, or store and further process large amounts of sensor data is then reviewed; examples illustrating why we need subjective views and pragmatic methods to analyze big data contents are brought forward. The review concludes on how cultural differences between East and West are likely to affect the course of big data analytics, and the development of increasingly autonomous artificial intelligence aimed at coping with the big data deluge in the near future.