 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Multirobot Collaborative Mobile Manipulation: the Omnid Mocobots
Jun 28, 2022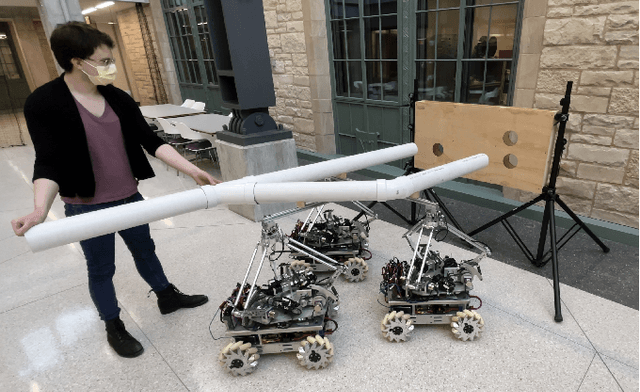
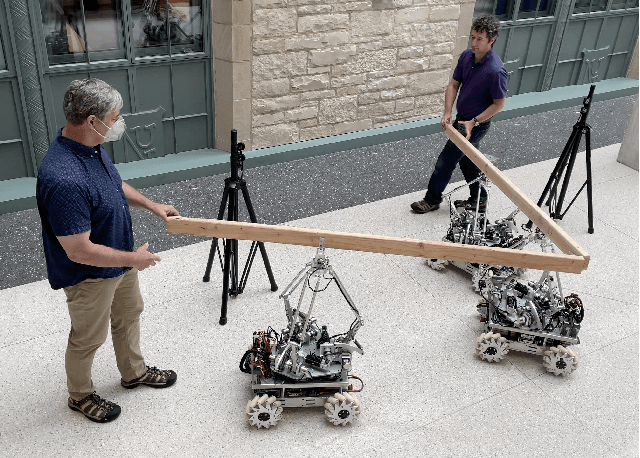
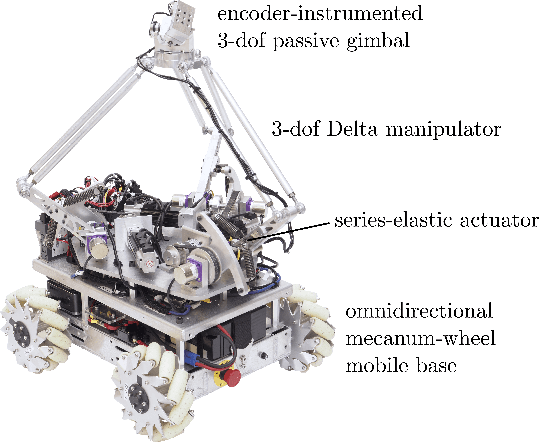

The Omnid human-collaborative mobile manipulators are an experimental platform for testing control architectures for autonomous and human-collaborative multirobot mobile manipulation. An Omnid consists of a mecanum-wheel omnidirectional mobile base and a series-elastic Delta-type parallel manipulator, and it is a specific implementation of a broader class of mobile collaborative robots ("mocobots") suitable for safe human co-manipulation of delicate, flexible, and articulated payloads. Key features of mocobots include passive compliance, for the safety of the human and the payload, and high-fidelity end-effector force control independent of the potentially imprecise motions of the mobile base. We describe general considerations for the design of teams of mocobots; the design of the Omnids in light of these considerations; manipulator and mobile base controllers to achieve useful multirobot collaborative behaviors; and initial experiments in human-multirobot collaborative mobile manipulation of large, unwieldy payloads. For these experiments, the only communication among the humans and Omnids is mechanical, through the payload.