 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Visual and Vehicular Sensors for Driver Behavior Analysis: A Survey
Aug 25, 2023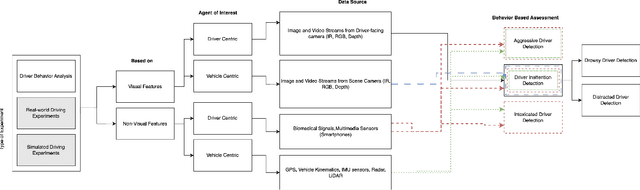
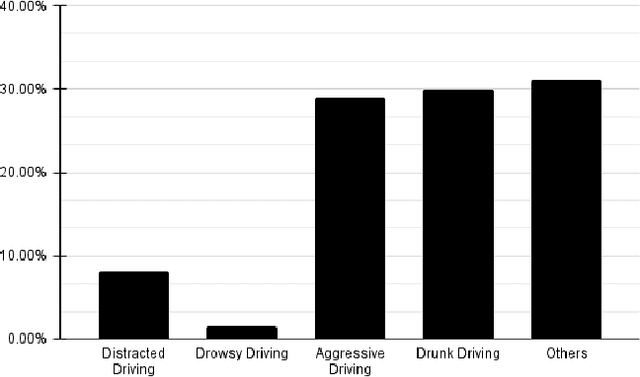
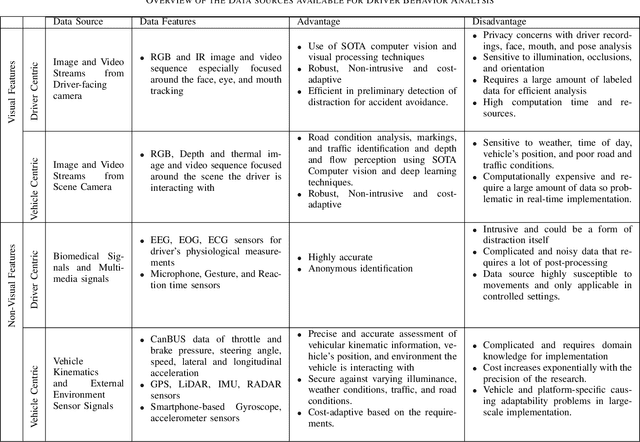
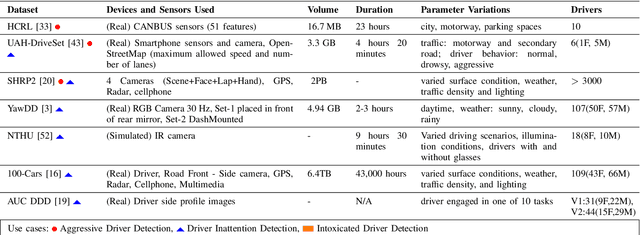
Risky drivers account for 70% of fatal accidents in the United States. With recent advances in sensors and intelligent vehicular systems, there has been significant research on assessing driver behavior to improve driving experiences and road safety. This paper examines the various techniques used to analyze driver behavior using visual and vehicular data, providing an overview of the latest research in this field. The paper also discusses the challenges and open problems in the field and offers potential recommendations for future research. The survey concludes that integrating vision and vehicular information can significantly enhance the accuracy and effectiveness of driver behavior analysis, leading to improved safety measures and reduced traffic accidents.
Color-based classification of EEG Signals for people with the severe locomotive disorder
Apr 12, 2023The neurons in the brain produces electric signals and a collective firing of these electric signals gives rise to brainwaves. These brainwave signals are captured using EEG (Electroencephalogram) devices as micro voltages. These sequence of signals captured by EEG sensors have embedded features in them that can be used for classification. The signals can be used as an alternative input for people suffering from severe locomotive disorder.Classification of different colors can be mapped for many functions like directional movement. In this paper, raw EEG signals from NeuroSky Mindwave headset (a single electrode EEG sensor) have been classified with an attention based Deep Learning Network. Attention based LSTM Networks have been implemented for classification of two different colors and four different colors. An accuracy of 93.5\% was obtained for classification of two colors and an accuracy of 65.75\% was obtained for classifcation of four signals using the mentioned attention based LSTM network.
Estimation of Vehicular Velocity based on Non-Intrusive stereo camera
Apr 11, 2023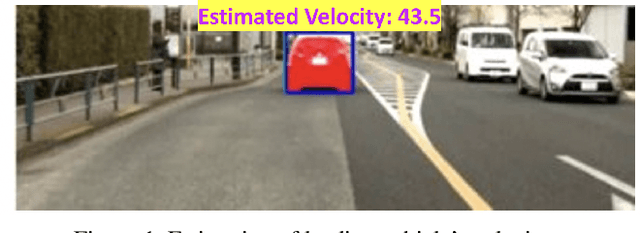
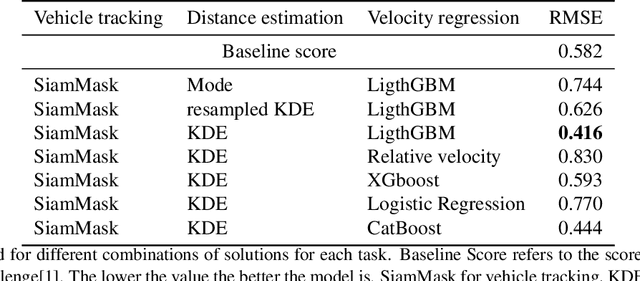

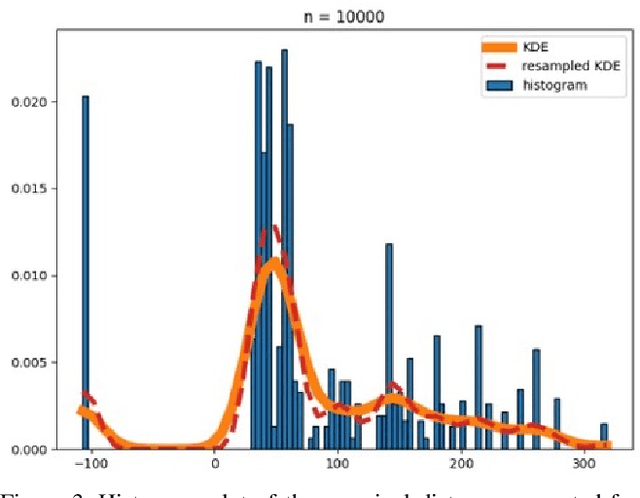
The paper presents a modular approach for the estimation of a leading vehicle's velocity based on a non-intrusive stereo camera where SiamMask is used for leading vehicle tracking, Kernel Density estimate (KDE) is used to smooth the distance prediction from a disparity map, and LightGBM is used for leading vehicle velocity estimation. Our approach yields an RMSE of 0.416 which outperforms the baseline RMSE of 0.582 for the SUBARU Image Recognition Challenge