Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of Vehicular Velocity based on Non-Intrusive stereo camera
Paper and Code
Apr 11, 2023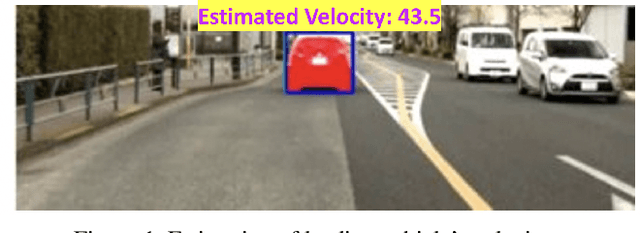
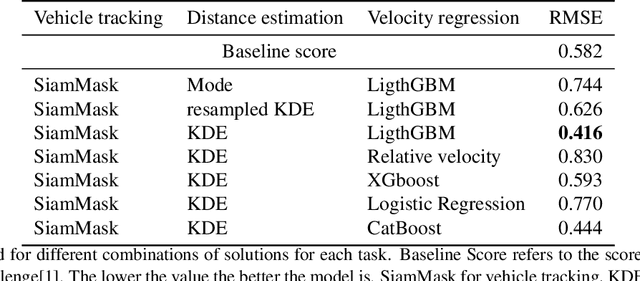

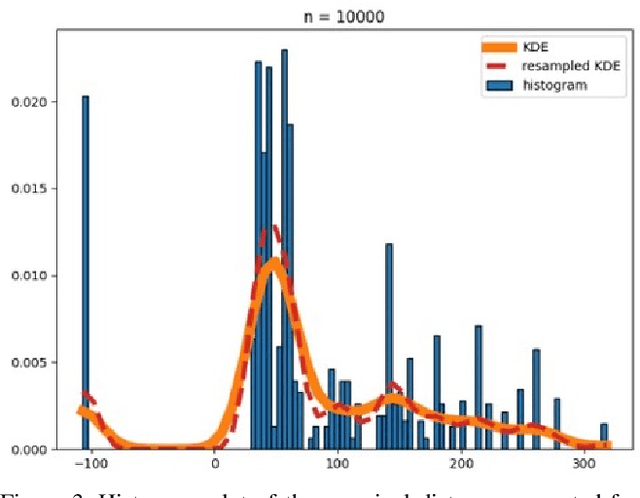
The paper presents a modular approach for the estimation of a leading vehicle's velocity based on a non-intrusive stereo camera where SiamMask is used for leading vehicle tracking, Kernel Density estimate (KDE) is used to smooth the distance prediction from a disparity map, and LightGBM is used for leading vehicle velocity estimation. Our approach yields an RMSE of 0.416 which outperforms the baseline RMSE of 0.582 for the SUBARU Image Recognition Challenge
* 5 pages, 4 images, 1 table
View paper on