 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Language for Accelerated Learning of Tool Manipulation
Jun 27, 2022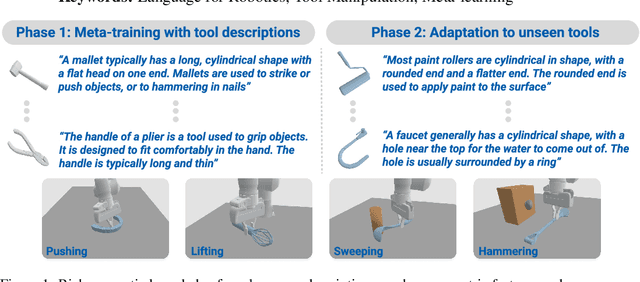
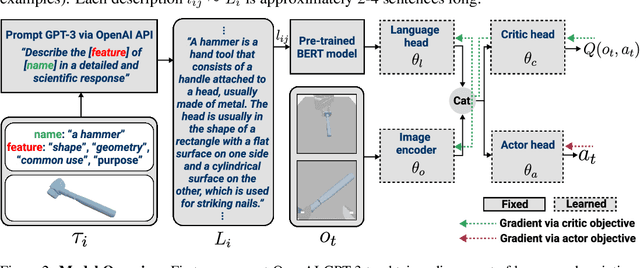
Robust and generalized tool manipulation requires an understanding of the properties and affordances of different tools. We investigate whether linguistic information about a tool (e.g., its geometry, common uses) can help control policies adapt faster to new tools for a given task. We obtain diverse descriptions of various tools in natural language and use pre-trained language models to generate their feature representations. We then perform language-conditioned meta-learning to learn policies that can efficiently adapt to new tools given their corresponding text descriptions. Our results demonstrate that combining linguistic information and meta-learning significantly accelerates tool learning in several manipulation tasks including pushing, lifting, sweeping, and hammering.