 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Collaborative Inertial Tracking
Oct 02, 2024Although people spend most of their time indoors, outdoor tracking systems, such as the Global Positioning System (GPS), are predominantly used for location-based services. These systems are accurate outdoors, easy to use, and operate autonomously on each mobile device. In contrast, Indoor Tracking Systems~(ITS) lack standardization and are often difficult to operate because they require costly infrastructure. In this paper, we propose an indoor tracking algorithm that uses collected data from inertial sensors embedded in most mobile devices. In this setting, mobile devices autonomously estimate their location, hence removing the burden of deploying and maintaining complex and scattered hardware infrastructure. In addition, these devices collaborate by anonymously exchanging data with other nearby devices, using wireless communication, such as Bluetooth, to correct errors in their location estimates. Our collaborative algorithm relies on low-complexity geometry operations and can be deployed on any recent mobile device with commercial-grade sensors. We evaluate our solution on real-life data collected by different devices. Experimentation with 16 simultaneously moving and collaborating devices shows an average accuracy improvement of 44% compared to the standalone Pedestrian Dead Reckoning algorithm.
* ACCEPTED FOR PUBLICATION AND PRESENTED IN EAI MOBIQUITOUS 2023
Generative Models for Simulating Mobility Trajectories
Nov 30, 2018

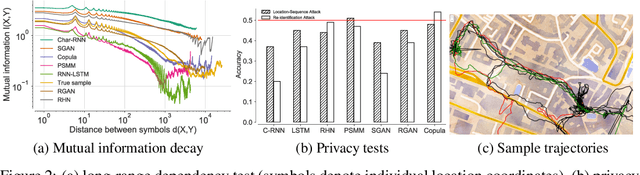

Mobility datasets are fundamental for evaluating algorithms pertaining to geographic information systems and facilitating experimental reproducibility. But privacy implications restrict sharing such datasets, as even aggregated location-data is vulnerable to membership inference attacks. Current synthetic mobility dataset generators attempt to superficially match a priori modeled mobility characteristics which do not accurately reflect the real-world characteristics. Modeling human mobility to generate synthetic yet semantically and statistically realistic trajectories is therefore crucial for publishing trajectory datasets having satisfactory utility level while preserving user privacy. Specifically, long-range dependencies inherent to human mobility are challenging to capture with both discriminative and generative models. In this paper, we benchmark the performance of recurrent neural architectures (RNNs), generative adversarial networks (GANs) and nonparametric copulas to generate synthetic mobility traces. We evaluate the generated trajectories with respect to their geographic and semantic similarity, circadian rhythms, long-range dependencies, training and generation time. We also include two sample tests to assess statistical similarity between the observed and simulated distributions, and we analyze the privacy tradeoffs with respect to membership inference and location-sequence attacks.