 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRaGon: Mining Latent Radio Channel Information from Geographical Data Leveraging Deep Learning
Dec 15, 2021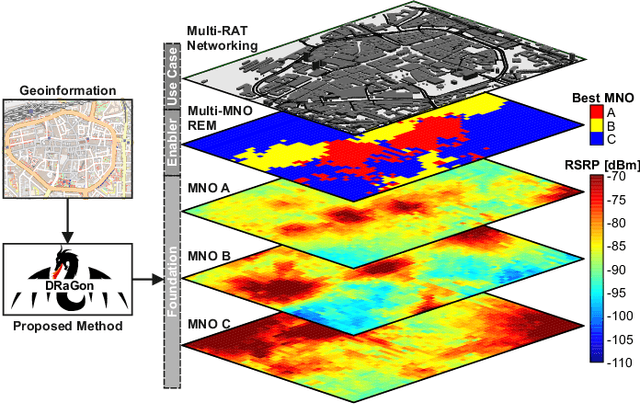
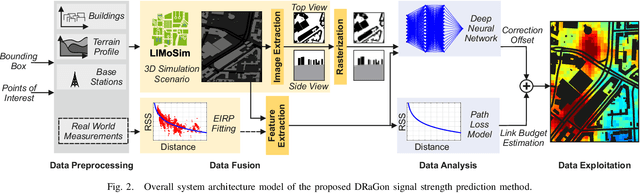


Radio channel modeling is one of the most fundamental aspects in the process of designing, optimizing, and simulating wireless communication networks. In this field, long-established approaches such as analytical channel models and ray tracing techniques represent the de-facto standard methodologies. However, as demonstrated by recent results, there remains an untapped potential to innovate this research field by enriching model-based approaches with machine learning techniques. In this paper, we present Deep RAdio channel modeling from GeOinformatioN (DRaGon) as a novel machine learning-enabled method for automatic generation of Radio Environmental Maps (REMs) from geographical data. For achieving accurate path loss prediction results, DRaGon combines determining features extracted from a three-dimensional model of the radio propagation environment with raw images of the receiver area within a deep learning model. In a comprehensive performance evaluation and validation campaign, we compare the accuracy of the proposed approach with real world measurements, ray tracing analyses, and well-known channel models. It is found that the combination of expert knowledge from the communications domain and the data analysis capabilities of deep learning allows to achieve a significantly higher prediction accuracy than the reference methods.
Machine Learning-Enabled Data Rate Prediction for 5G NSA Vehicle-to-Cloud Communications
Sep 09, 2021
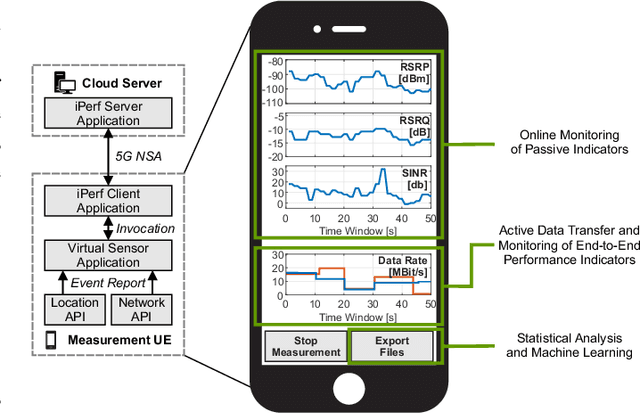


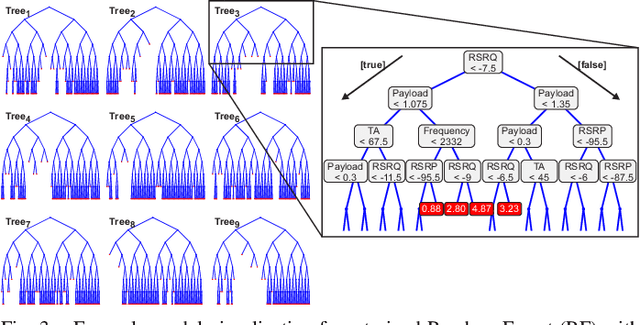
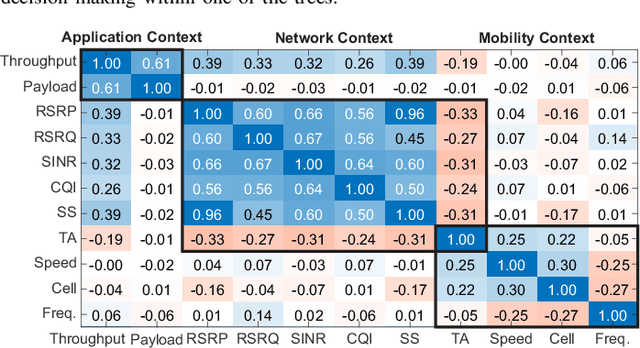
In order to satisfy the ever-growing Quality of Service (QoS) requirements of innovative services, cellular communication networks are constantly evolving. Recently, the 5G NonStandalone (NSA) mode has been deployed as an intermediate strategy to deliver high-speed connectivity to early adopters of 5G by incorporating Long Term Evolution (LTE) network infrastructure. In addition to the technological advancements, novel communication paradigms such as anticipatory mobile networking aim to achieve a more intelligent usage of the available network resources through exploitation of context knowledge. For this purpose, novel methods for proactive prediction of the end-to-end behavior are seen as key enablers. In this paper, we present a first empirical analysis of client-based end-to-end data rate prediction for 5G NSA vehicle-to-cloud communications. Although this operation mode is characterized by massive fluctuations of the observed data rate, the results show that conventional machine learning methods can utilize locally acquirable measurements for achieving comparably accurate estimations of the end-to-end behavior.
A Low Cost Modular Radio Tomography System for Bicycle and Vehicle Detection and Classification
Feb 11, 2021
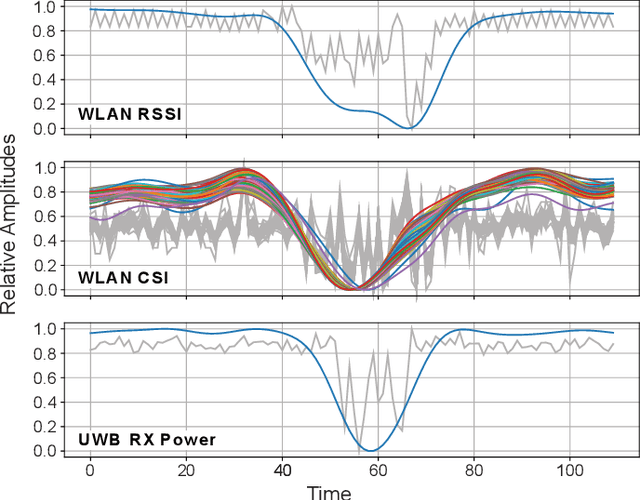
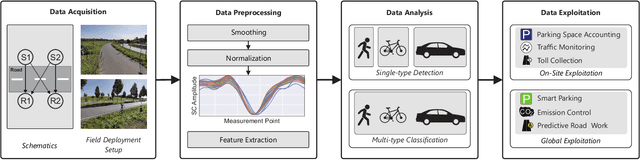
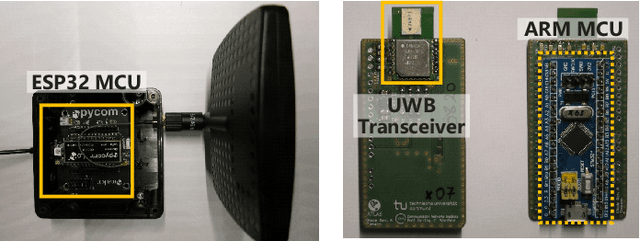
The advancing deployment of ubiquitous Internet of Things (IoT)-powered vehicle detection and classification systems will successively turn the existing road infrastructure into a highly dynamical and interconnected Cyber-physical System (CPS). Though many different sensor systems have been proposed in recent years, these solutions can only meet a subset of requirements, including cost-efficiency, robustness, accuracy, and privacy preservation. This paper provides a modular system approach that exploits radio tomography in terms of attenuation patterns and highly accurate channel information for reliable and robust detection and classification of different road users. Hereto, we use Wireless Local Area Network (WLAN) and Ultra-Wideband (UWB) transceiver modules providing either Channel State Information (CSI) or Channel Impulse Response (CIR) data. Since the proposed system utilizes off-the-shelf and power-efficient embedded systems, it allows for a cost-efficient ad-hoc deployment in existing road infrastructures. We have evaluated the proposed system's performance for cyclists and other motorized vehicles with an experimental live deployment. In this concern, the primary focus has been on the accurate detection of cyclists on a bicycle path. However, we also have conducted preliminary evaluation tests measuring different motorized vehicles using a similar system configuration as for the cyclists. In summary, the system achieves up to 100% accuracy for detecting cyclists and more than 98% classifying cyclists and cars.
Flying Robots for Safe and Efficient Parcel Delivery Within the COVID-19 Pandemic
Jan 19, 2021



The integration of small-scale Unmanned Aerial Vehicles (UAVs) into Intelligent Transportation Systems (ITSs) will empower novel smart-city applications and services. After the unforeseen outbreak of the COVID-19 pandemic, the public demand for delivery services has multiplied. Mobile robotic systems inherently offer the potential for minimizing the amount of direct human-to-human interactions with the parcel delivery process. The proposed system-of-systems consists of various complex aspects such as assigning and distributing delivery jobs, establishing and maintaining reliable communication links between the vehicles, as well as path planning and mobility control. In this paper, we apply a system-level perspective for identifying key challenges and promising solution approaches for modeling, analysis, and optimization of UAV-aided parcel delivery. We present a system-of-systems model for UAV-assisted parcel delivery to cope with higher capacity requirements induced by the COVID-19. To demonstrate the benefits of hybrid vehicular delivery, we present a case study focusing on the prioritization of time-critical deliveries such as medical goods. The results further confirm that the capacity of traditional delivery fleets can be upgraded with drone usage. Furthermore, we observe that the delay incurred by prioritizing time-critical deliveries can be compensated with drone deployment. Finally, centralized and decentralized communication approaches for data transmission inside hybrid delivery fleets are compared.
LIMITS: Lightweight Machine Learning for IoT Systems with Resource Limitations
Jan 28, 2020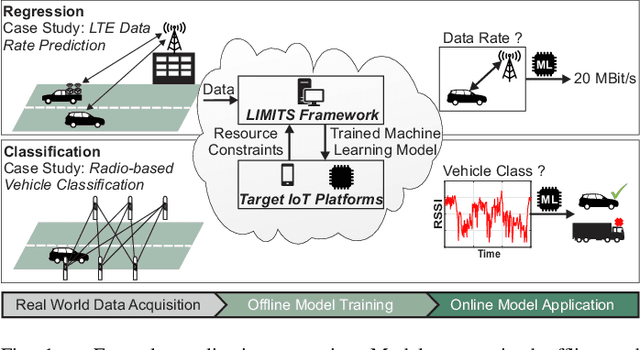
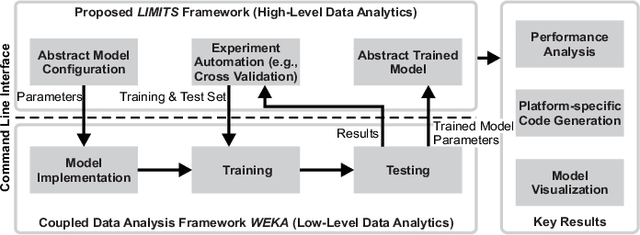
Exploiting big data knowledge on small devices will pave the way for building truly cognitive Internet of Things (IoT) systems. Although machine learning has led to great advancements for IoT-based data analytics, there remains a huge methodological gap for the deployment phase of trained machine learning models. For given resource-constrained platforms such as Microcontroller Units (MCUs), model choice and parametrization are typically performed based on heuristics or analytical models. However, these approaches are only able to provide rough estimates of the required system resources as they do not consider the interplay of hardware, compiler specific optimizations, and code dependencies. In this paper, we present the novel open source framework LIghtweight Machine learning for IoT Systems (LIMITS), which applies a platform-in-the-loop approach explicitly considering the actual compilation toolchain of the target IoT platform. LIMITS focuses on high level tasks such as experiment automation, platform-specific code generation, and sweet spot determination. The solid foundations of validated low-level model implementations are provided by the coupled well-established data analysis framework Waikato Environment for Knowledge Analysis (WEKA). We apply and validate LIMITS in two case studies focusing on cellular data rate prediction and radio-based vehicle classification, where we compare different learning models and real world IoT platforms with memory constraints from 16 kB to 4 MB and demonstrate its potential to catalyze the development of machine learning enabled IoT systems.
B.A.T.Mobile: Leveraging Mobility Control Knowledge for Efficient Routing in Mobile Robotic Networks
Feb 21, 2018
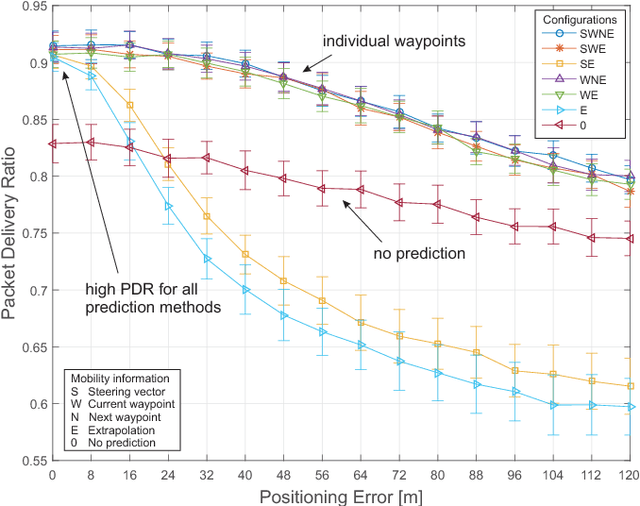


Efficient routing is one of the key challenges of wireless networking for unmanned autonomous vehicles (UAVs) due to dynamically changing channel and network topology characteristics. Various well known mobile-ad-hoc routing protocols, such as AODV, OLSR and B.A.T.M.A.N. have been proposed to allow for proactive and reactive routing decisions. In this paper, we present a novel approach which leverages application layer knowledge derived from mobility control algorithms guiding the behavior of UAVs to fulfill a dedicated task. Thereby a prediction of future trajectories of the UAVs can be integrated with the routing protocol to avoid unexpected route breaks and packet loss. The proposed extension of the B.A.T.M.A.N. routing protocol by a mobility prediction component - called B.A.T.Mobile - has shown to be very effective to realize this concept. The results of in-depth simulation studies show that the proposed protocol reaches a distinct higher availability compared to the established approaches and shows robust behavior even in challenging channel conditions.
An OMNeT++ based Framework for Mobility-aware Routing in Mobile Robotic Networks
Sep 17, 2016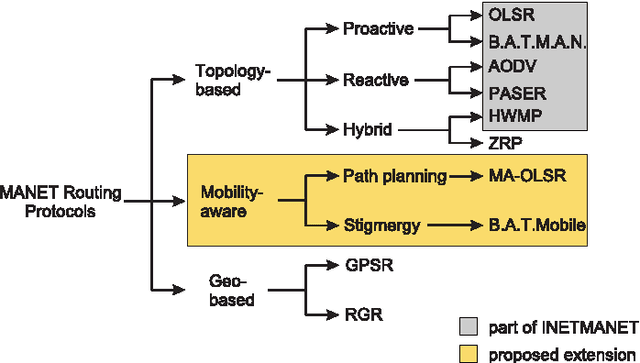
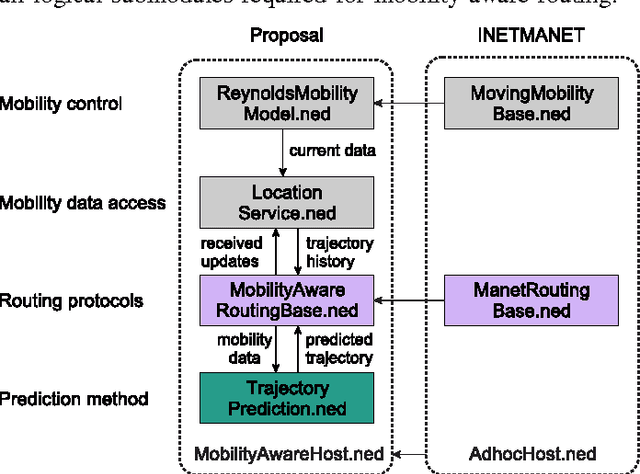
In this paper, we propose a cross-layer extension for the INETMANET framework of OMNeT++, which utilizes mobility control knowledge to enhance the forwarding of routing messages. The well-known mobility meta-model from Reynolds is used to provide a realistic representation of the mobility behavior of autonomous agents with respect to the various influences those agents have to face in real-world applications. Knowledge about the current mobility properties and its predicted development is used by mobility-aware routing mechanisms in order to optimize routing decisions and avoid path losses at runtime. In a proof of concept evaluation, we show that our proposed methods can achieve significant improvements to the robustness of communication paths.