 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRay Tracing Algorithm for Reconfigurable Intelligent Surfaces
Feb 20, 2024



Ray tracing accelerated with graphics processing units (GPUs) is an accurate and efficient simulation technique of wireless communication channels. In this paper, we extend a GPU-accelerated ray tracer (RT) to support the effects of reconfigurable intelligent surfaces (RISs). To evaluate the electric field, we derived a RIS path loss model that can be integrated into a RT and enables further extensions for the implementation of additional features and incorporation into complex reflective scenarios. We verify the derivation and implementation of our model by comparison with empirical measurements in a lab environment. We demonstrate the capabilities of our model to support higher-order reflections from the RIS to the receiver. We find that such components have a significant effect on the received signal strength, concluding that the extensions of advanced functionality enabled by our model play an important role in the accurate modeling of radio wave propagation in an environment including RISs.
Frame Error Rate Prediction for Non-Stationary Wireless Vehicular Communication Links
Apr 12, 2023



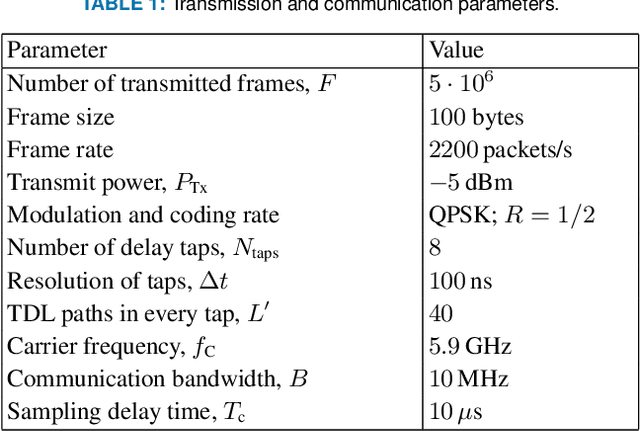
Wireless vehicular communication will increase the safety of road users. The reliability of vehicular communication links is of high importance as links with low reliability may diminish the advantage of having situational traffic information. The goal of our investigation is to obtain a reliable coverage area for non-stationary vehicular scenarios. Therefore we propose a deep neural network (DNN) for predicting the expected frame error rate (FER). The DNN is trained in a supervised fashion, where a time-limited sequence of channel frequency responses has been labeled with its corresponding FER values assuming an underlying wireless communication system, i.e. IEEE 802.11p. For generating the training dataset we use a geometry-based stochastic channel model (GSCM). We obtain the ground truth FER by emulating the time-varying frequency responses using a hardware-in-the-loop setup. Our GSCM provides the propagation path parameters which we use to fix the statistics of the fading process at one point in space for an arbitrary amount of time, enabling accurate FER estimation. Using this dataset we achieve an accuracy of 85% of the DNN. We use the trained model to predict the FER for measured time-varying channel transfer functions obtained during a measurement campaign. We compare the predicted output of the DNN to the measured FER on the road and obtain a prediction accuracy of 78%.
Multi-Link Vehicular Wireless Channel Modelling: Impact of Large Obstructing Vehicles
Mar 11, 2021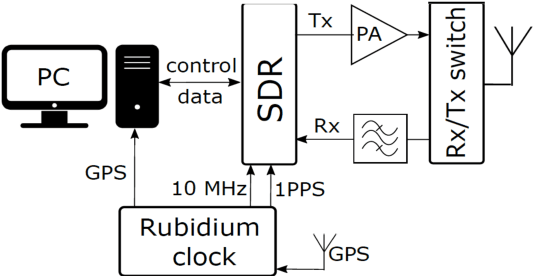

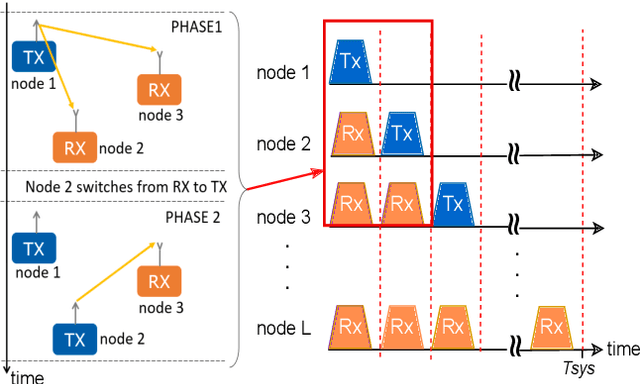
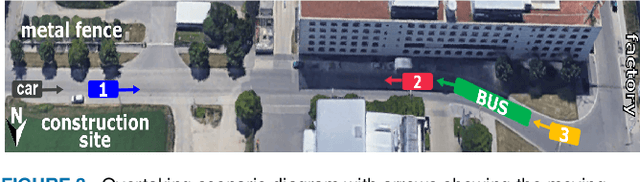
Multi-node channel sounding simultaneously captures multiple channel transfer functions in complex scenarios. It ensures that measurement conditions are identical for all observed links. This is particularly beneficial in analyzing highly-dynamic vehicular communication scenarios, where the measurement conditions and wireless channel statistics change rapidly. We present the first fully mobile multi-node vehicular wireless channel sounding results. We analyze the impact of a double-decker bus on the channel statistics in two measurement scenarios. The measurement data is used to calibrate an OpenStreetMap geometry-based stochastic channel model and include a more accurate modeling for large vehicles, absent from previous models. We validate our model using a link-level emulation, demonstrating a good match with measurement data. Finally, we propose a relaying scenario and test it on link-level by comparing the time-variant error rates of measured links.
Real-Time Vehicular Wireless System-Level Simulation
Dec 22, 2020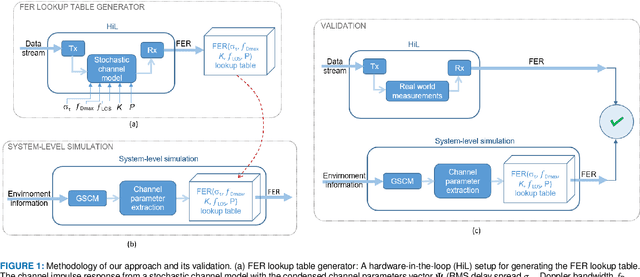


Future automation and control units for advanced driver assistance systems (ADAS) will exchange sensor and kinematic data with nearby vehicles using wireless communication links to improve traffic safety. In this paper we present an accurate real-time system-level simulation for multi-vehicle communication scenarios to support the development and test of connected ADAS systems. The physical and data-link layer are abstracted and provide the frame error rate (FER) to a network simulator. The FER is strongly affected by the non-stationary doubly dispersive fading process of the vehicular radio communication channel. We use a geometry-based stochastic channel model (GSCM) to enable a simplified but still accurate representation of the non-stationary vehicular fading process. The propagation path parameters of the GSCM are used to efficiently compute the time-variant condensed radio channel parameters per stationarity region of each communication link during run-time. Five condensed radio channel parameters mainly determine the FER forming a parameter vector: path loss, root mean square delay spread, Doppler bandwidth, $K$-factor, and line-of-sight Doppler shift. We measure the FER for a pre-defined set of discrete grid points of the parameter vector using a channel emulator and a given transmitter-receiver modem pair. The FER data is stored in a table and looked up during run-time of the real-time system-level simulation. We validate our methodology using empirical measurement data from a street crossing scenarios demonstrating a close match in terms of FER between simulation and measurement.