 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Vehicular Wireless System-Level Simulation
Paper and Code
Dec 22, 2020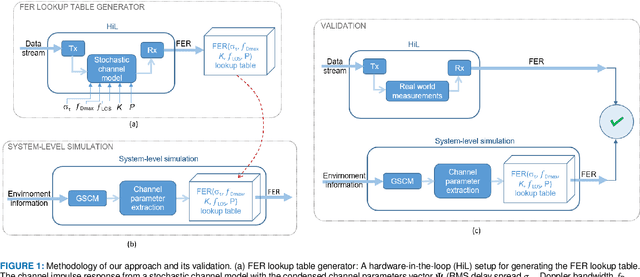


Future automation and control units for advanced driver assistance systems (ADAS) will exchange sensor and kinematic data with nearby vehicles using wireless communication links to improve traffic safety. In this paper we present an accurate real-time system-level simulation for multi-vehicle communication scenarios to support the development and test of connected ADAS systems. The physical and data-link layer are abstracted and provide the frame error rate (FER) to a network simulator. The FER is strongly affected by the non-stationary doubly dispersive fading process of the vehicular radio communication channel. We use a geometry-based stochastic channel model (GSCM) to enable a simplified but still accurate representation of the non-stationary vehicular fading process. The propagation path parameters of the GSCM are used to efficiently compute the time-variant condensed radio channel parameters per stationarity region of each communication link during run-time. Five condensed radio channel parameters mainly determine the FER forming a parameter vector: path loss, root mean square delay spread, Doppler bandwidth, $K$-factor, and line-of-sight Doppler shift. We measure the FER for a pre-defined set of discrete grid points of the parameter vector using a channel emulator and a given transmitter-receiver modem pair. The FER data is stored in a table and looked up during run-time of the real-time system-level simulation. We validate our methodology using empirical measurement data from a street crossing scenarios demonstrating a close match in terms of FER between simulation and measurement.