 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast, On-board, Model-aided Visual-Inertial Odometry System for Quadrotor Micro Aerial Vehicles
Jul 06, 2016
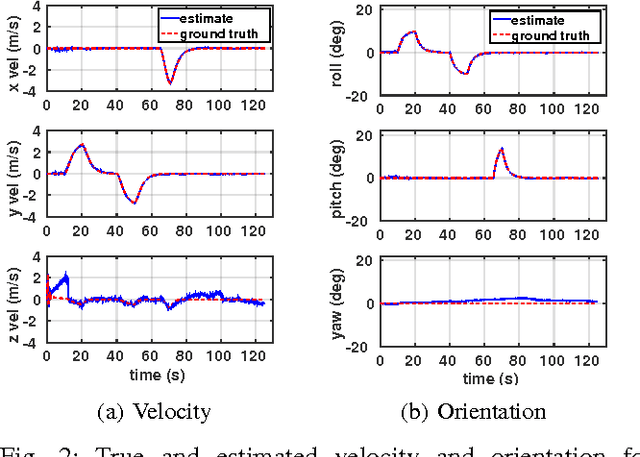
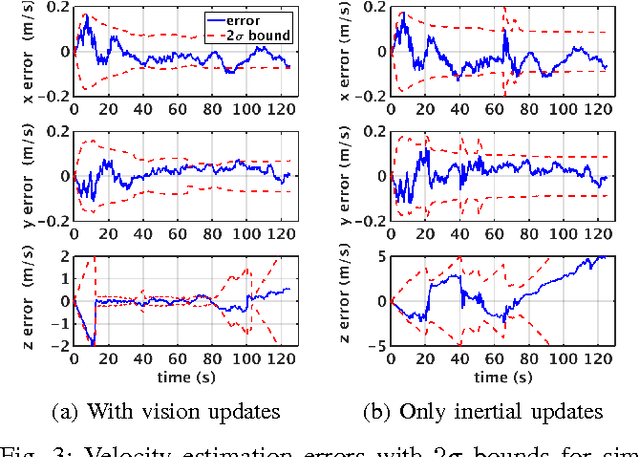
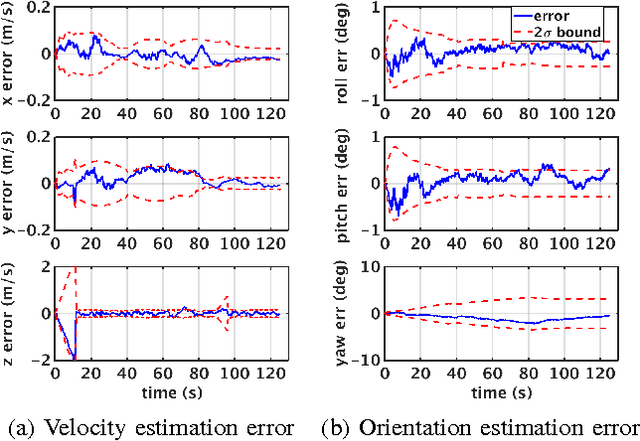
The main contribution of this paper is a high frequency, low-complexity, on-board visual-inertial odometry system for quadrotor micro air vehicles. The system consists of an extended Kalman filter (EKF) based state estimation algorithm that fuses information from a low cost MEMS inertial measurement unit acquired at 200Hz and VGA resolution images from a monocular camera at 50Hz. The dynamic model describing the quadrotor motion is employed in the estimation algorithm as a third source of information. Visual information is incorporated into the EKF by enforcing the epipolar constraint on features tracked between image pairs, avoiding the need to explicitly estimate the location of the tracked environmental features. Combined use of the dynamic model and epipolar constraints makes it possible to obtain drift free velocity and attitude estimates in the presence of both accelerometer and gyroscope biases. A strategy to deal with the unobservability that arises when the quadrotor is in hover is also provided. Experimental data from a real-time implementation of the system on a 50 gram embedded computer are presented in addition to the simulations to demonstrate the efficacy of the proposed system.
* 8 pages