 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom Matrix Based Extended Target Tracking with Orientation: A New Model and Inference
Oct 17, 2020
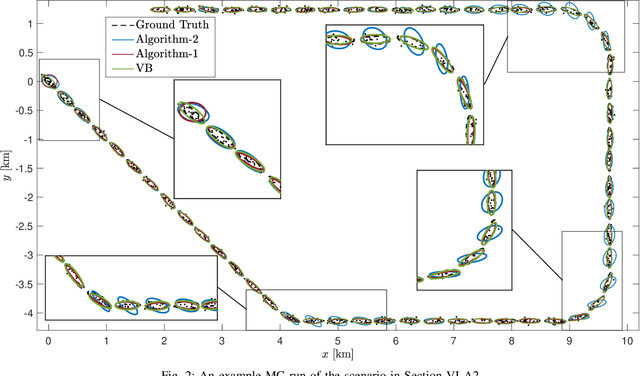


In this study, we propose a novel extended target tracking algorithm which is capable of representing the extent of dynamic objects as an ellipsoid with a time-varying orientation angle. A diagonal positive semi-definite matrix is defined to model objects' extent within the random matrix framework where the diagonal elements have inverse-Gamma priors. The resulting measurement equation is non-linear in the state variables, and it is not possible to find a closed-form analytical expression for the true posterior because of the absence of conjugacy. We use the variational Bayes technique to perform approximate inference, where the Kullback-Leibler divergence between the true and the approximate posterior is minimized by performing fixed-point iterations. The update equations are easy to implement, and the algorithm can be used in real-time tracking applications. We illustrate the performance of the method in simulations and experiments with real data. The proposed method outperforms the state-of-the-art methods when compared with respect to accuracy and robustness.
Extended Target Tracking and Classification Using Neural Networks
Feb 13, 2020
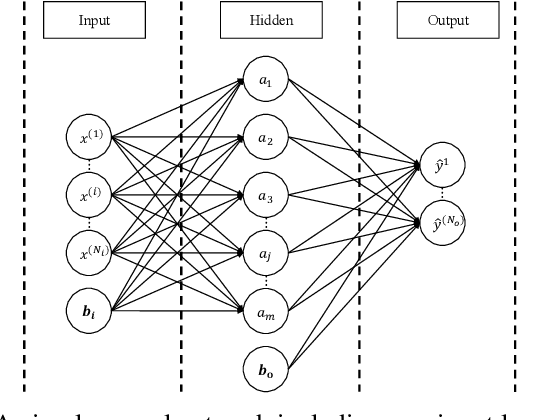
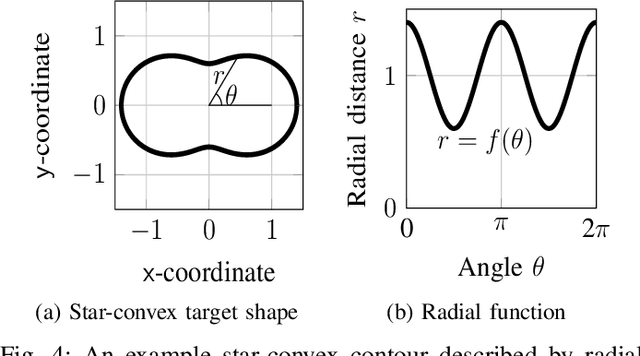
Extended target/object tracking (ETT) problem involves tracking objects which potentially generate multiple measurements at a single sensor scan. State-of-the-art ETT algorithms can efficiently exploit the available information in these measurements such that they can track the dynamic behaviour of objects and learn their shapes simultaneously. Once the shape estimate of an object is formed, it can naturally be utilized by high-level tasks such as classification of the object type. In this work, we propose to use a naively deep neural network, which consists of one input, two hidden and one output layers, to classify dynamic objects regarding their shape estimates. The proposed method shows superior performance in comparison to a Bayesian classifier for simulation experiments.