 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom Matrix Based Extended Target Tracking with Orientation: A New Model and Inference
Paper and Code
Oct 17, 2020
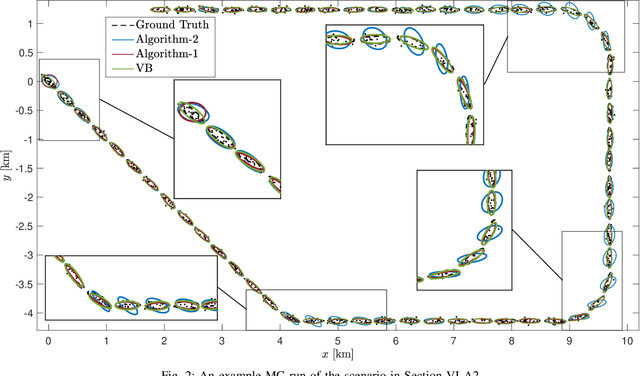


In this study, we propose a novel extended target tracking algorithm which is capable of representing the extent of dynamic objects as an ellipsoid with a time-varying orientation angle. A diagonal positive semi-definite matrix is defined to model objects' extent within the random matrix framework where the diagonal elements have inverse-Gamma priors. The resulting measurement equation is non-linear in the state variables, and it is not possible to find a closed-form analytical expression for the true posterior because of the absence of conjugacy. We use the variational Bayes technique to perform approximate inference, where the Kullback-Leibler divergence between the true and the approximate posterior is minimized by performing fixed-point iterations. The update equations are easy to implement, and the algorithm can be used in real-time tracking applications. We illustrate the performance of the method in simulations and experiments with real data. The proposed method outperforms the state-of-the-art methods when compared with respect to accuracy and robustness.