 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Target Tracking and Classification Using Neural Networks
Feb 13, 2020
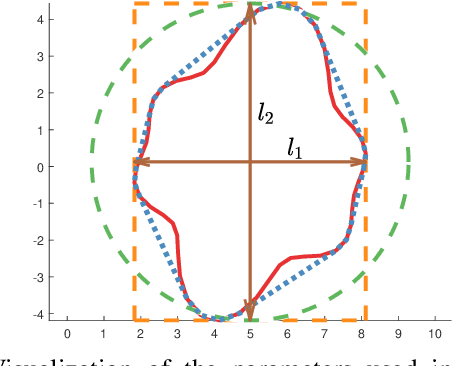
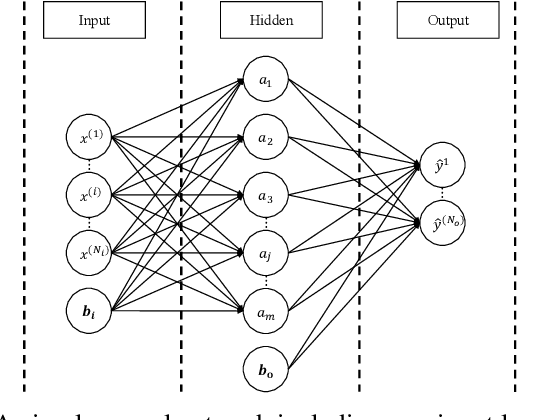
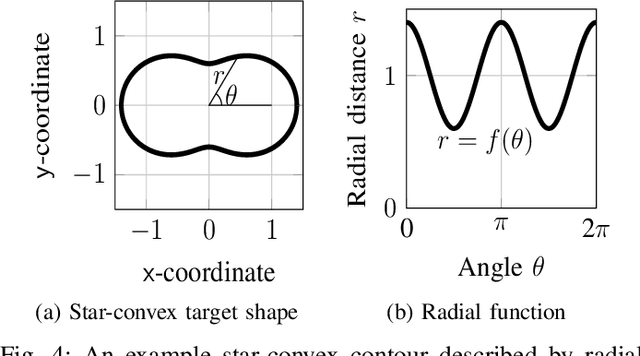
Extended target/object tracking (ETT) problem involves tracking objects which potentially generate multiple measurements at a single sensor scan. State-of-the-art ETT algorithms can efficiently exploit the available information in these measurements such that they can track the dynamic behaviour of objects and learn their shapes simultaneously. Once the shape estimate of an object is formed, it can naturally be utilized by high-level tasks such as classification of the object type. In this work, we propose to use a naively deep neural network, which consists of one input, two hidden and one output layers, to classify dynamic objects regarding their shape estimates. The proposed method shows superior performance in comparison to a Bayesian classifier for simulation experiments.