 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToP-ToM: Trust-aware Robot Policy with Theory of Mind
Nov 07, 2023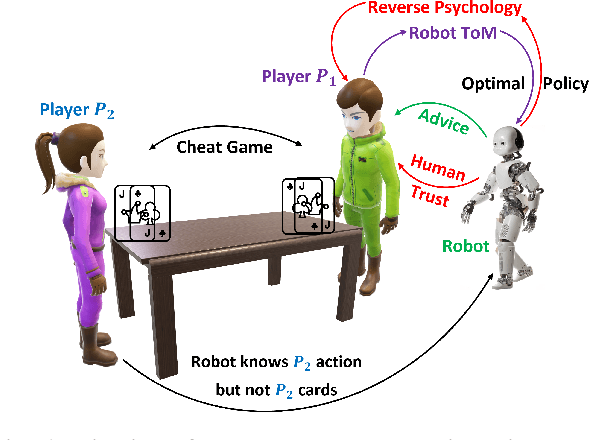
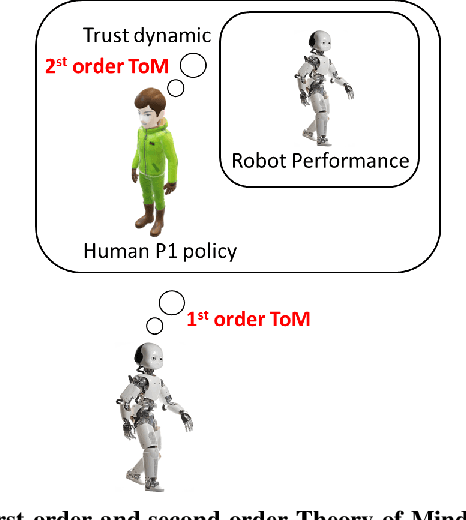
Theory of Mind (ToM) is a fundamental cognitive architecture that endows humans with the ability to attribute mental states to others. Humans infer the desires, beliefs, and intentions of others by observing their behavior and, in turn, adjust their actions to facilitate better interpersonal communication and team collaboration. In this paper, we investigated trust-aware robot policy with the theory of mind in a multiagent setting where a human collaborates with a robot against another human opponent. We show that by only focusing on team performance, the robot may resort to the reverse psychology trick, which poses a significant threat to trust maintenance. The human's trust in the robot will collapse when they discover deceptive behavior by the robot. To mitigate this problem, we adopt the robot theory of mind model to infer the human's trust beliefs, including true belief and false belief (an essential element of ToM). We designed a dynamic trust-aware reward function based on different trust beliefs to guide the robot policy learning, which aims to balance between avoiding human trust collapse due to robot reverse psychology. The experimental results demonstrate the importance of the ToM-based robot policy for human-robot trust and the effectiveness of our robot ToM-based robot policy in multiagent interaction settings.