 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgese-TrackNet: Data-driven 6D Pose Tracking by Calibrating Image Residuals in Synthetic Domains
Jul 27, 2020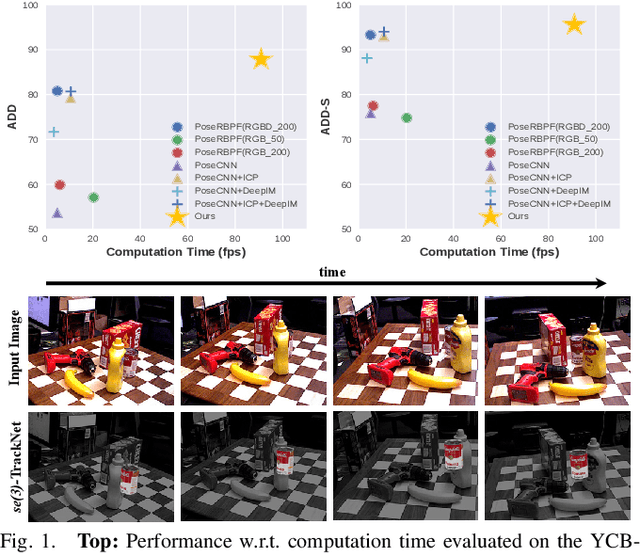
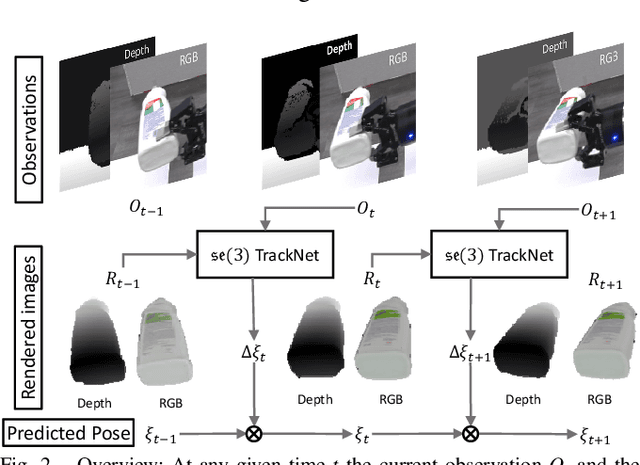
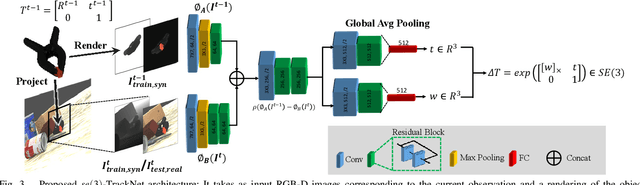
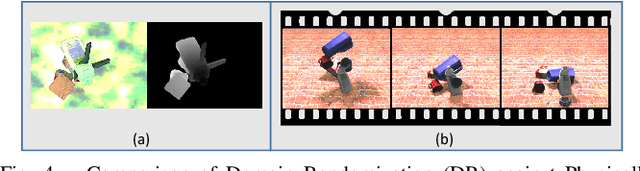
Tracking the 6D pose of objects in video sequences is important for robot manipulation. This task, however, introduces multiple challenges: (i) robot manipulation involves significant occlusions; (ii) data and annotations are troublesome and difficult to collect for 6D poses, which complicates machine learning solutions, and (iii) incremental error drift often accumulates in long term tracking to necessitate re-initialization of the object's pose. This work proposes a data-driven optimization approach for long-term, 6D pose tracking. It aims to identify the optimal relative pose given the current RGB-D observation and a synthetic image conditioned on the previous best estimate and the object's model. The key contribution in this context is a novel neural network architecture, which appropriately disentangles the feature encoding to help reduce domain shift, and an effective 3D orientation representation via Lie Algebra. Consequently, even when the network is trained only with synthetic data can work effectively over real images. Comprehensive experiments over benchmarks - existing ones as well as a new dataset with significant occlusions related to object manipulation - show that the proposed approach achieves consistently robust estimates and outperforms alternatives, even though they have been trained with real images. The approach is also the most computationally efficient among the alternatives and achieves a tracking frequency of 90.9Hz.