 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDXM-TransFuse U-net: Dual Cross-Modal Transformer Fusion U-net for Automated Nerve Identification
Feb 27, 2022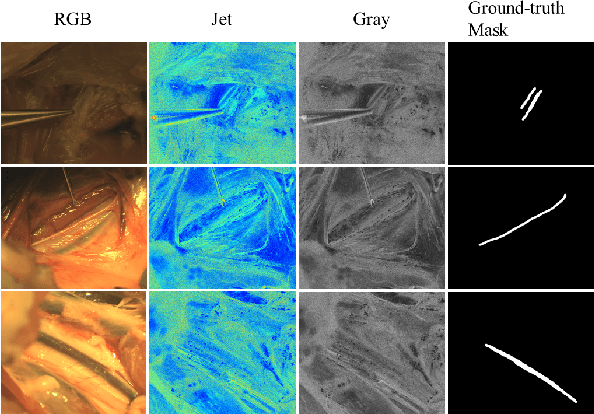
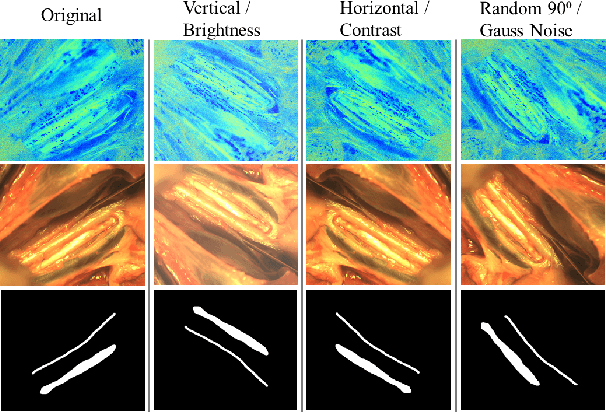
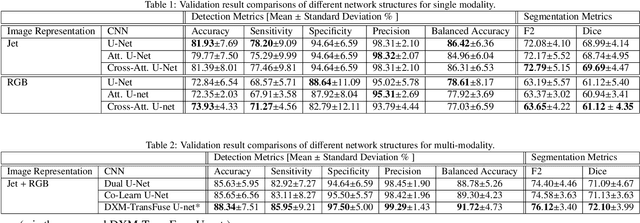
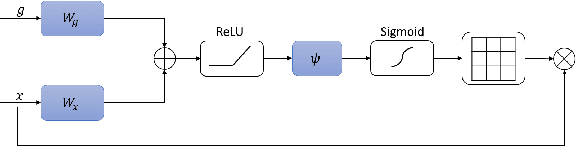
Accurate nerve identification is critical during surgical procedures for preventing any damages to nerve tissues. Nerve injuries can lead to long-term detrimental effects for patients as well as financial overburdens. In this study, we develop a deep-learning network framework using the U-Net architecture with a Transformer block based fusion module at the bottleneck to identify nerve tissues from a multi-modal optical imaging system. By leveraging and extracting the feature maps of each modality independently and using each modalities information for cross-modal interactions, we aim to provide a solution that would further increase the effectiveness of the imaging systems for enabling the noninvasive intraoperative nerve identification.
A MultiModal Social Robot Toward Personalized Emotion Interaction
Oct 08, 2021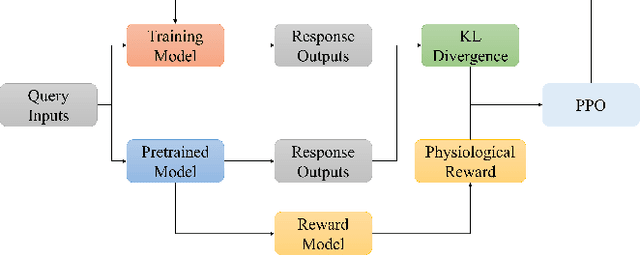
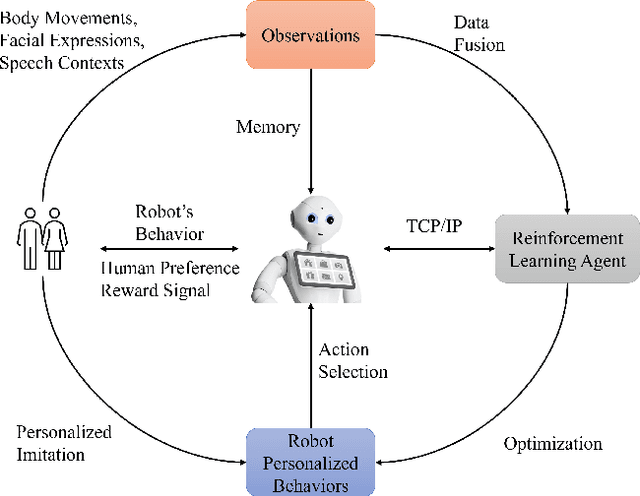
Human emotions are expressed through multiple modalities, including verbal and non-verbal information. Moreover, the affective states of human users can be the indicator for the level of engagement and successful interaction, suitable for the robot to use as a rewarding factor to optimize robotic behaviors through interaction. This study demonstrates a multimodal human-robot interaction (HRI) framework with reinforcement learning to enhance the robotic interaction policy and personalize emotional interaction for a human user. The goal is to apply this framework in social scenarios that can let the robots generate a more natural and engaging HRI framework.