Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA MultiModal Social Robot Toward Personalized Emotion Interaction
Paper and Code
Oct 08, 2021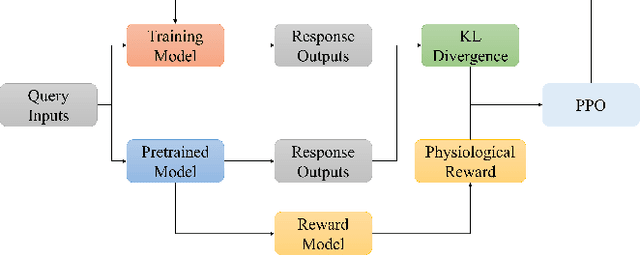
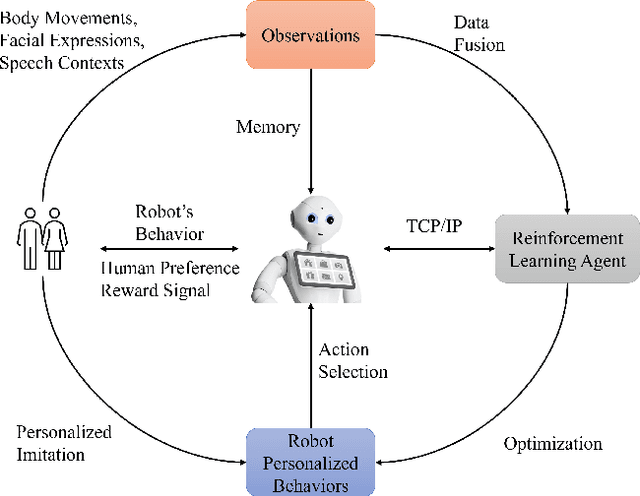
Human emotions are expressed through multiple modalities, including verbal and non-verbal information. Moreover, the affective states of human users can be the indicator for the level of engagement and successful interaction, suitable for the robot to use as a rewarding factor to optimize robotic behaviors through interaction. This study demonstrates a multimodal human-robot interaction (HRI) framework with reinforcement learning to enhance the robotic interaction policy and personalize emotional interaction for a human user. The goal is to apply this framework in social scenarios that can let the robots generate a more natural and engaging HRI framework.
* Presented at AI-HRI symposium as part of AAAI-FSS 2021
(arXiv:2109.10836)
View paper on