 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoCo: Online Mixed-Integer Control via Supervised Learning
Jul 16, 2021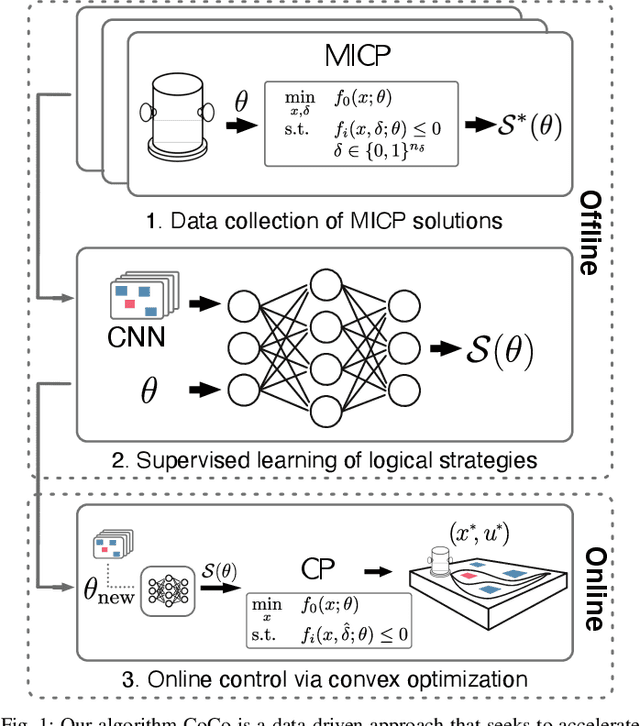
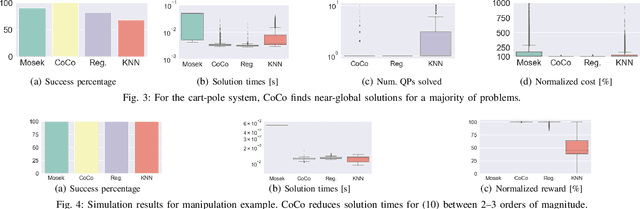
Many robotics problems, from robot motion planning to object manipulation, can be modeled as mixed-integer convex programs (MICPs). However, state-of-the-art algorithms are still unable to solve MICPs for control problems quickly enough for online use and existing heuristics can typically only find suboptimal solutions that might degrade robot performance. In this work, we turn to data-driven methods and present the Combinatorial Offline, Convex Online (CoCo) algorithm for quickly finding high quality solutions for MICPs. CoCo consists of a two-stage approach. In the offline phase, we train a neural network classifier that maps the problem parameters to a (logical strategy), which we define as the discrete arguments and relaxed big-M constraints associated with the optimal solution for that problem. Online, the classifier is applied to select a candidate logical strategy given new problem parameters; applying this logical strategy allows us to solve the original MICP as a convex optimization problem. We show through numerical experiments how CoCo finds near optimal solutions to MICPs arising in robot planning and control with 1 to 2 orders of magnitude solution speedup compared to other data-driven approaches and solvers.
Learning Mixed-Integer Convex Optimization Strategies for Robot Planning and Control
Apr 07, 2020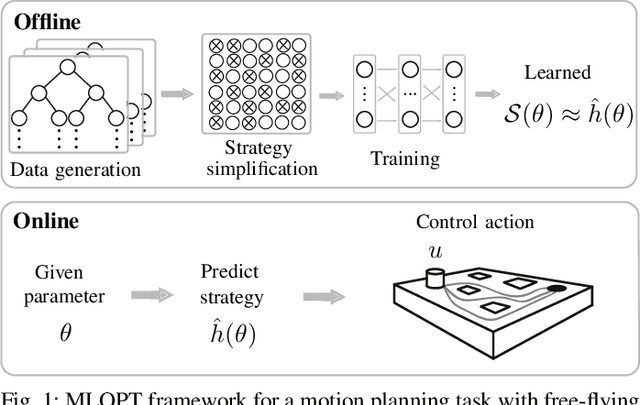
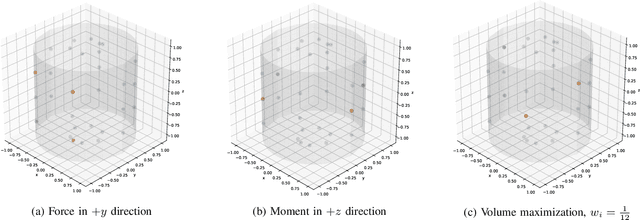
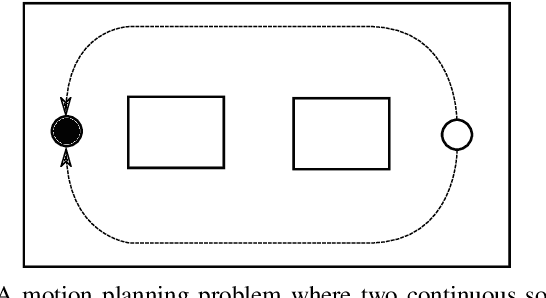
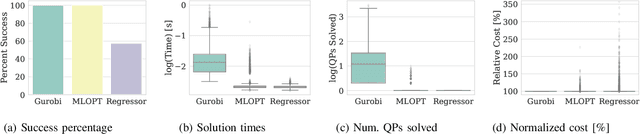
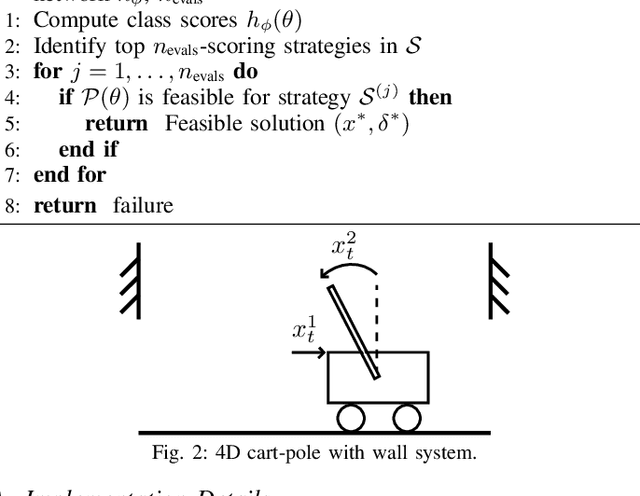
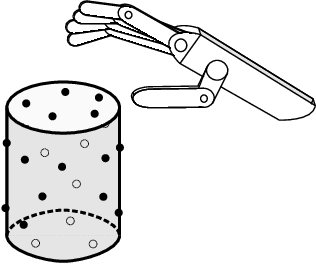
Mixed-integer convex programming (MICP) has seen significant algorithmic and hardware improvements with several orders of magnitude solve time speedups compared to 25 years ago. Despite these advances, MICP has been rarely applied to real-world robotic control because the solution times are still too slow for online applications. In this work, we extend the machine learning optimizer (MLOPT) framework to solve MICPs arising in robotics at very high speed. MLOPT encodes the combinatorial part of the optimal solution into a strategy. Using data collected from offline problem solutions, we train a multiclass classifier to predict the optimal strategy given problem-specific parameters such as states or obstacles. Compared to previous approaches, we use task-specific strategies and prune redundant ones to significantly reduce the number of classes the predictor has to select from, thereby greatly improving scalability. Given the predicted strategy, the control task becomes a small convex optimization problem that we can solve in milliseconds. Numerical experiments on a cart-pole system with walls, a free-flying space robot and task-oriented grasps show that our method provides not only 1 to 2 orders of magnitude speedups compared to state-of-the-art solvers but also performance close to the globally optimal MICP solution.