 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContextually Aware Intelligent Control Agents for Heterogeneous Swarms
Nov 22, 2022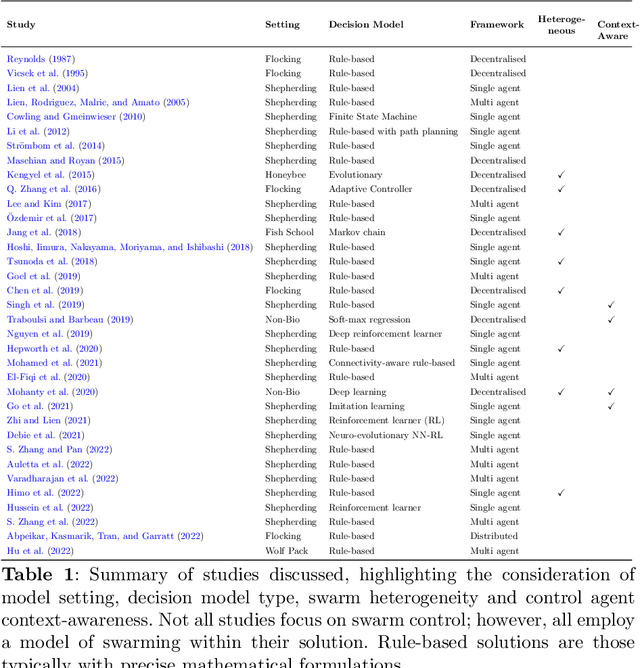
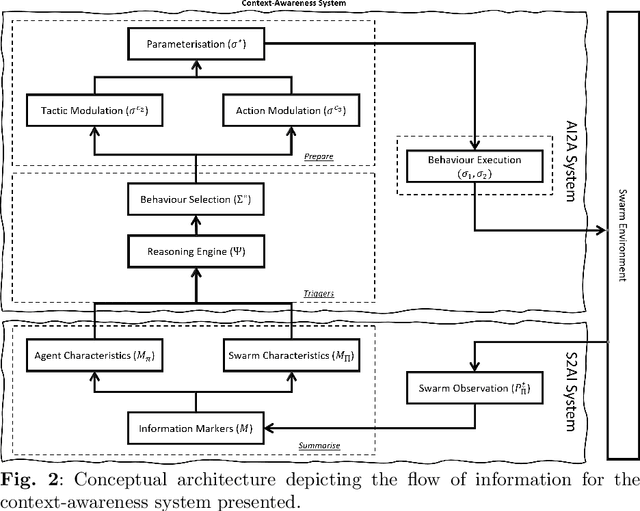
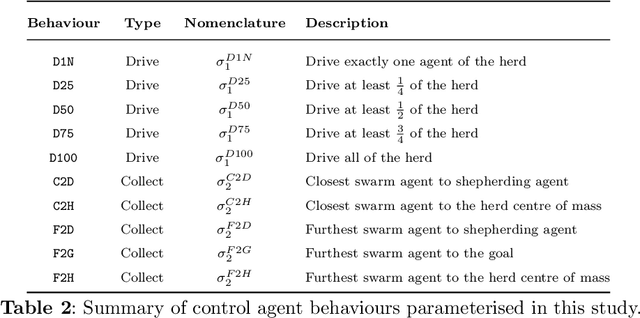
An emerging challenge in swarm shepherding research is to design effective and efficient artificial intelligence algorithms that maintain a low-computational ceiling while increasing the swarm's abilities to operate in diverse contexts. We propose a methodology to design a context-aware swarm-control intelligent agent. The intelligent control agent (shepherd) first uses swarm metrics to recognise the type of swarm it interacts with to then select a suitable parameterisation from its behavioural library for that particular swarm type. The design principle of our methodology is to increase the situation awareness (i.e. information contents) of the control agent without sacrificing the low-computational cost necessary for efficient swarm control. We demonstrate successful shepherding in both homogeneous and heterogeneous swarms.
Developing Decentralised Resilience to Malicious Influence in Collective Perception Problem
Nov 06, 2022In collective decision-making, designing algorithms that use only local information to effect swarm-level behaviour is a non-trivial problem. We used machine learning techniques to teach swarm members to map their local perceptions of the environment to an optimal action. A curriculum inspired by Machine Education approaches was designed to facilitate this learning process and teach the members the skills required for optimal performance in the collective perception problem. We extended upon previous approaches by creating a curriculum that taught agents resilience to malicious influence. The experimental results show that well-designed rules-based algorithms can produce effective agents. When performing opinion fusion, we implemented decentralised resilience by having agents dynamically weight received opinion. We found a non-significant difference between constant and dynamic weights, suggesting that momentum-based opinion fusion is perhaps already a resilience mechanism.
Swarm Analytics: Designing Information Markers to Characterise Swarm Systems in Shepherding Contexts
Aug 26, 2022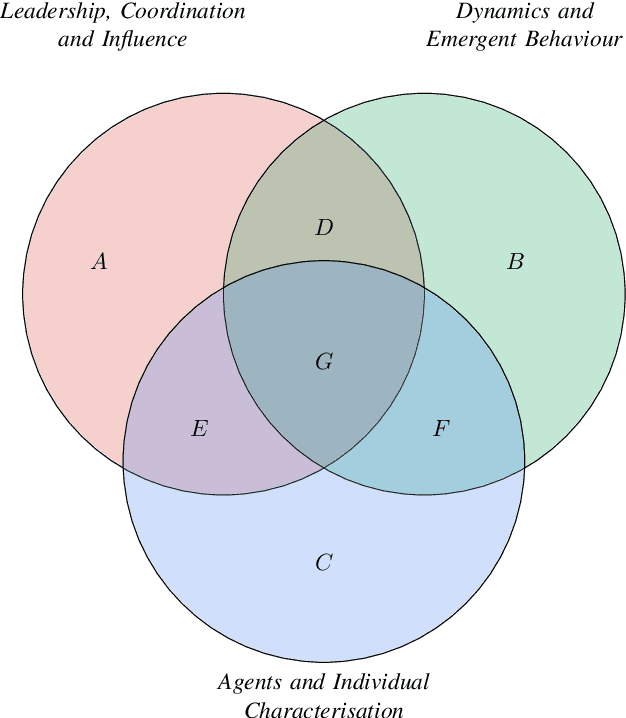
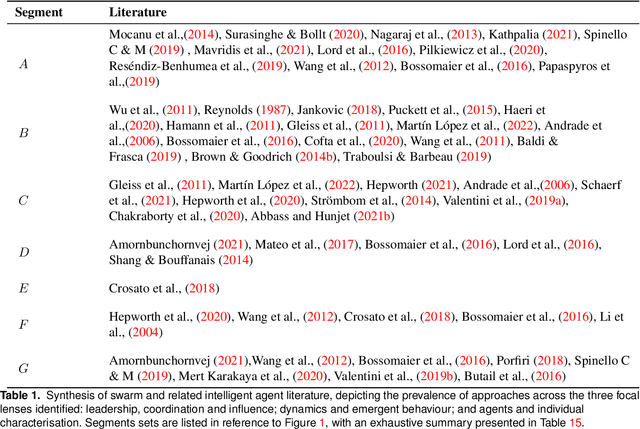
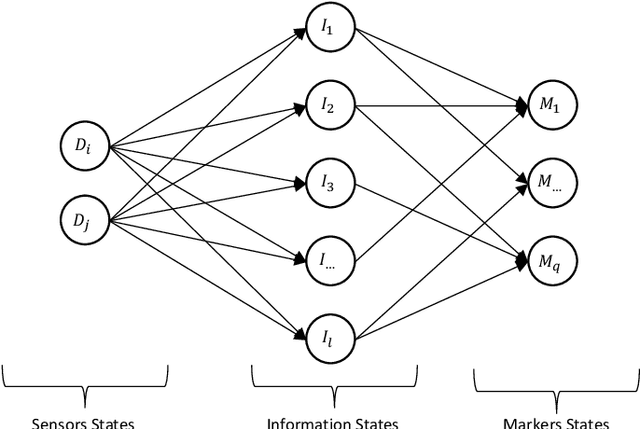

Contemporary swarm indicators are often used in isolation, focused on extracting information at the individual or collective levels. These are seldom integrated to infer a top-level operating picture of the swarm, its individual members, and its overall collective dynamics. The primary contribution of this paper is to organise a suite of indicators about swarms into an ontologically-arranged collection of information markers to characterise the swarm from the perspective of an external observer-, a recognition agent. Our contribution shows the foundations for a new area of research that we title \emph{swarm analytics}, which its primary concern is with the design and organisation of collections of swarm markers to understand, detect, recognise, track, and learn a particular insight about a swarm system. We present our designed framework of information markers presents a new avenue for swarm research, especially for heterogeneous and cognitive swarms that may require more advanced capabilities to detect agencies and categorise agent influences and responses.