 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI-based closed-loop fMRI system
Jan 30, 2024While generative AI is now widespread and useful in society, there are potential risks of misuse, e.g., unconsciously influencing cognitive processes or decision-making. Although this causes a security problem in the cognitive domain, there has been no research about neural and computational mechanisms counteracting the impact of malicious generative AI in humans. We propose DecNefGAN, a novel framework that combines a generative adversarial system and a neural reinforcement model. More specifically, DecNefGAN bridges human and generative AI in a closed-loop system, with the AI creating stimuli that induce specific mental states, thus exerting external control over neural activity. The objective of the human is the opposite, to compete and reach an orthogonal mental state. This framework can contribute to elucidating how the human brain responds to and counteracts the potential influence of generative AI.
"Task-relevant autoencoding" enhances machine learning for human neuroscience
Aug 17, 2022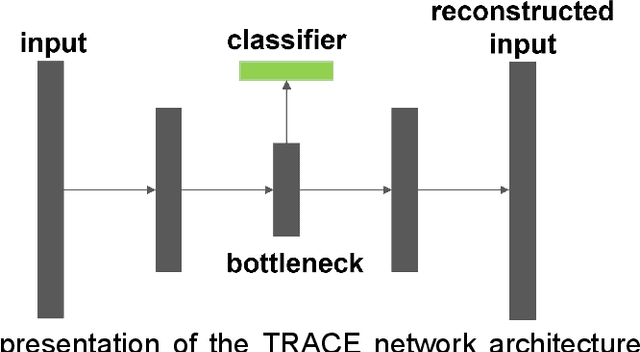
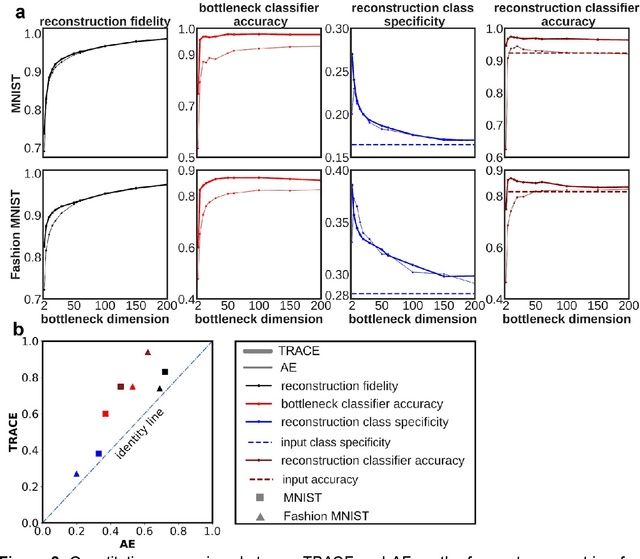
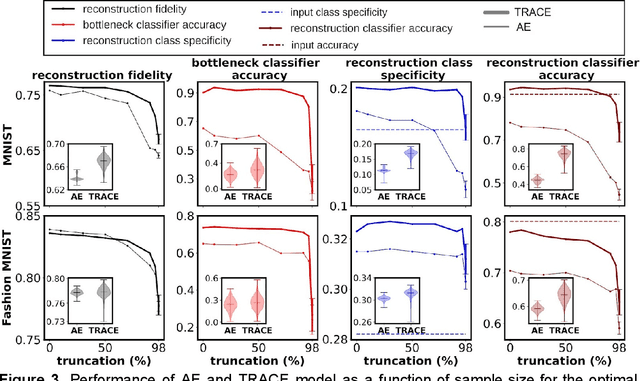

In human neuroscience, machine learning can help reveal lower-dimensional neural representations relevant to subjects' behavior. However, state-of-the-art models typically require large datasets to train, so are prone to overfitting on human neuroimaging data that often possess few samples but many input dimensions. Here, we capitalized on the fact that the features we seek in human neuroscience are precisely those relevant to subjects' behavior. We thus developed a Task-Relevant Autoencoder via Classifier Enhancement (TRACE), and tested its ability to extract behaviorally-relevant, separable representations compared to a standard autoencoder for two severely truncated machine learning datasets. We then evaluated both models on fMRI data where subjects observed animals and objects. TRACE outperformed both the autoencoder and raw inputs nearly unilaterally, showing up to 30% increased classification accuracy and up to threefold improvement in discovering "cleaner", task-relevant representations. These results showcase TRACE's potential for a wide variety of data related to human behavior.
From internal models toward metacognitive AI
Sep 27, 2021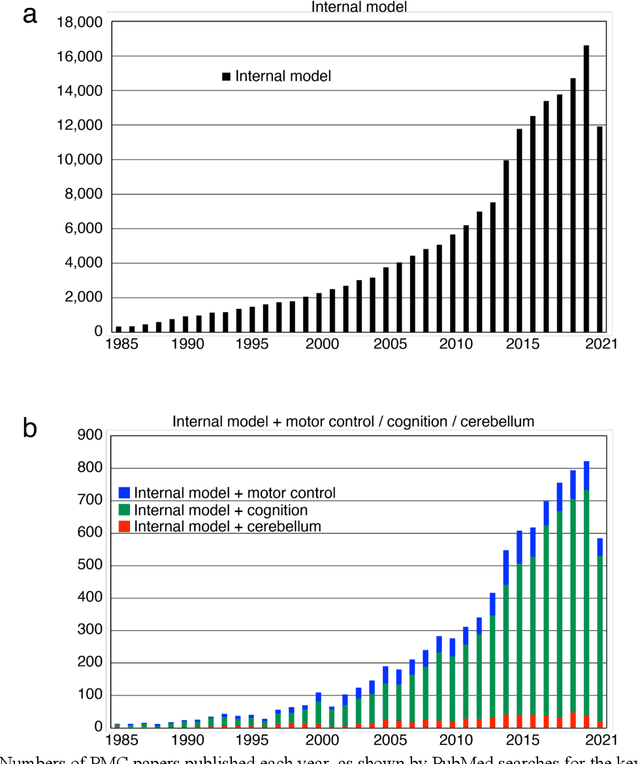
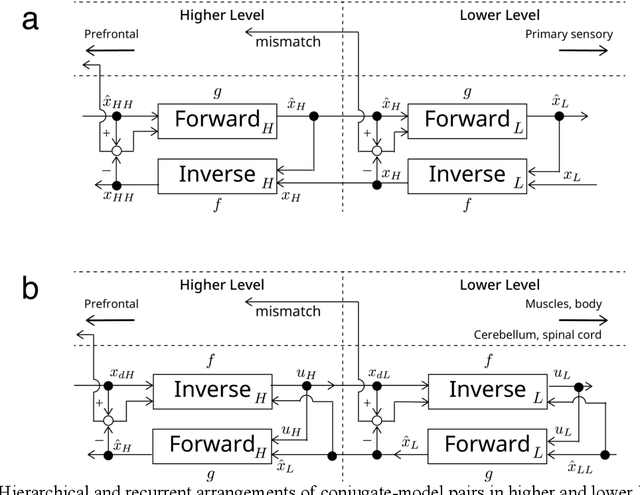
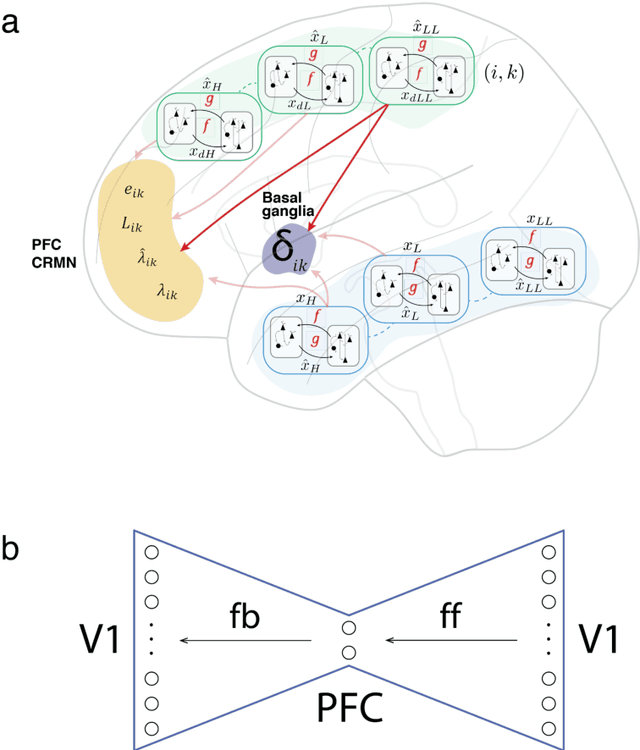
In several papers published in Biological Cybernetics in the 1980s and 1990s, Kawato and colleagues proposed computational models explaining how internal models are acquired in the cerebellum. These models were later supported by neurophysiological experiments using monkeys and neuroimaging experiments involving humans. These early studies influenced neuroscience from basic, sensory-motor control to higher cognitive functions. One of the most perplexing enigmas related to internal models is to understand the neural mechanisms that enable animals to learn large-dimensional problems with so few trials. Consciousness and metacognition -- the ability to monitor one's own thoughts, may be part of the solution to this enigma. Based on literature reviews of the past 20 years, here we propose a computational neuroscience model of metacognition. The model comprises a modular hierarchical reinforcement-learning architecture of parallel and layered, generative-inverse model pairs. In the prefrontal cortex, a distributed executive network called the "cognitive reality monitoring network" (CRMN) orchestrates conscious involvement of generative-inverse model pairs in perception and action. Based on mismatches between computations by generative and inverse models, as well as reward prediction errors, CRMN computes a "responsibility signal" that gates selection and learning of pairs in perception, action, and reinforcement learning. A high responsibility signal is given to the pairs that best capture the external world, that are competent in movements (small mismatch), and that are capable of reinforcement learning (small reward prediction error). CRMN selects pairs with higher responsibility signals as objects of metacognition, and consciousness is determined by the entropy of responsibility signals across all pairs.
Attention or memory? Neurointerpretable agents in space and time
Jul 12, 2020
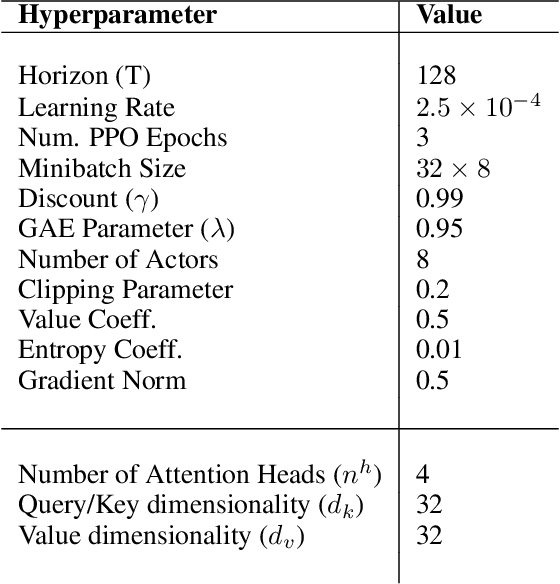
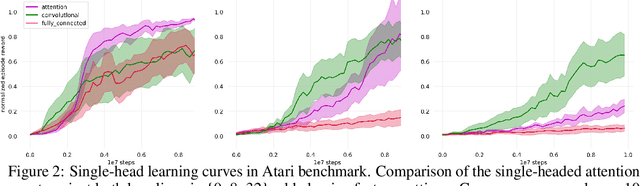

In neuroscience, attention has been shown to bidirectionally interact with reinforcement learning (RL) processes. This interaction is thought to support dimensionality reduction of task representations, restricting computations to relevant features. However, it remains unclear whether these properties can translate into real algorithmic advantages for artificial agents, especially in dynamic environments. We design a model incorporating a self-attention mechanism that implements task-state representations in semantic feature-space, and test it on a battery of Atari games. To evaluate the agent's selective properties, we add a large volume of task-irrelevant features to observations. In line with neuroscience predictions, self-attention leads to increased robustness to noise compared to benchmark models. Strikingly, this self-attention mechanism is general enough, such that it can be naturally extended to implement a transient working-memory, able to solve a partially observable maze task. Lastly, we highlight the predictive quality of attended stimuli. Because we use semantic observations, we can uncover not only which features the agent elects to base decisions on, but also how it chooses to compile more complex, relational features from simpler ones. These results formally illustrate the benefits of attention in deep RL and provide evidence for the interpretability of self-attention mechanisms.