 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Quantum Search Approach to Magic Square Constraint Problems with Classical Benchmarking
Apr 06, 2026This paper presents a quantum search approach to combinatorial constraint satisfaction problems, demonstrated through the generation of magic squares. We reformulate magic square construction as a quantum search problem in which a reversible, constraint-sensitive oracle marks valid configurations for amplitude amplification via Grover's algorithm. Classical pre-processing using the Siamese construction and partial constraint checks generates a compact candidate domain before quantum encoding. Rather than integrating classical and quantum solvers in an iterative loop, this work uses the classical component for structured initialisation and the quantum component for search, and benchmarks the quantum approach against classical brute-force enumeration and backtracking. Our Qiskit implementation demonstrates the design of multi-register modular arithmetic circuits, oracle logic, and diffusion operators. Experiments are conducted on small grid instances, as larger grids are intractable on classical statevector simulators due to exponential memory growth. The results validate the correctness of the proposed quantum search pipeline and confirm the theoretical quadratic query advantage over classical search.
Confidential Computing for Cloud Security: Exploring Hardware based Encryption Using Trusted Execution Environments
Nov 06, 2025The growth of cloud computing has revolutionized data processing and storage capacities to another levels of scalability and flexibility. But in the process, it has created a huge challenge of security, especially in terms of safeguarding sensitive data. Classical security practices, including encryption at rest and during transit, fail to protect data in use and expose it to various possible breaches. In response to this problem , Confidential Computing has been a tool ,seeking to secure data in processing by usage of hardware-based Trusted Execution Environments (TEEs). TEEs, including Intel's Software Guard Extensions (SGX) and ARM's TrustZone, offers protected contexts within the processor, where data is kept confidential ,intact and secure , even with malicious software or compromised operating systems. In this research, we have explored the architecture and security features of TEEs like Intel SGX and ARM TrustZone, and their effectiveness in improving cloud data security. From a thorough literature survey ,we have analyzed the deployment strategies, performance indicators, and practical uses of these TEEs for the same purpose. In addition, we have discussed the issues regarding deployment, possible weaknesses, scalability issues, and integration issues. Our results focuses on the central position of TEEs in strengthening and advancing cloud security infrastructures, pointing towards their ability to create a secure foundation for Confidential Computing.
Breaking BERT: Gradient Attack on Twitter Sentiment Analysis for Targeted Misclassification
Apr 02, 2025



Social media platforms like Twitter have increasingly relied on Natural Language Processing NLP techniques to analyze and understand the sentiments expressed in the user generated content. One such state of the art NLP model is Bidirectional Encoder Representations from Transformers BERT which has been widely adapted in sentiment analysis. BERT is susceptible to adversarial attacks. This paper aims to scrutinize the inherent vulnerabilities of such models in Twitter sentiment analysis. It aims to formulate a framework for constructing targeted adversarial texts capable of deceiving these models, while maintaining stealth. In contrast to conventional methodologies, such as Importance Reweighting, this framework core idea resides in its reliance on gradients to prioritize the importance of individual words within the text. It uses a whitebox approach to attain fine grained sensitivity, pinpointing words that exert maximal influence on the classification outcome. This paper is organized into three interdependent phases. It starts with fine-tuning a pre-trained BERT model on Twitter data. It then analyzes gradients of the model to rank words on their importance, and iteratively replaces those with feasible candidates until an acceptable solution is found. Finally, it evaluates the effectiveness of the adversarial text against the custom trained sentiment classification model. This assessment would help in gauging the capacity of the adversarial text to successfully subvert classification without raising any alarm.
e-Inu: Simulating A Quadruped Robot With Emotional Sentience
Jan 03, 2023



Quadruped robots are currently used in industrial robotics as mechanical aid to automate several routine tasks. However, presently, the usage of such a robot in a domestic setting is still very much a part of the research. This paper discusses the understanding and virtual simulation of such a robot capable of detecting and understanding human emotions, generating its gait, and responding via sounds and expression on a screen. To this end, we use a combination of reinforcement learning and software engineering concepts to simulate a quadruped robot that can understand emotions, navigate through various terrains and detect sound sources, and respond to emotions using audio-visual feedback. This paper aims to establish the framework of simulating a quadruped robot that is emotionally intelligent and can primarily respond to audio-visual stimuli using motor or audio response. The emotion detection from the speech was not as performant as ERANNs or Zeta Policy learning, still managing an accuracy of 63.5%. The video emotion detection system produced results that are almost at par with the state of the art, with an accuracy of 99.66%. Due to its "on-policy" learning process, the PPO algorithm was extremely rapid to learn, allowing the simulated dog to demonstrate a remarkably seamless gait across the different cadences and variations. This enabled the quadruped robot to respond to generated stimuli, allowing us to conclude that it functions as predicted and satisfies the aim of this work.
Synthetic Data for Feature Selection
Nov 06, 2022


Feature selection is an important and active field of research in machine learning and data science. Our goal in this paper is to propose a collection of synthetic datasets that can be used as a common reference point for feature selection algorithms. Synthetic datasets allow for precise evaluation of selected features and control of the data parameters for comprehensive assessment. The proposed datasets are based on applications from electronics in order to mimic real life scenarios. To illustrate the utility of the proposed data we employ one of the datasets to test several popular feature selection algorithms. The datasets are made publicly available on GitHub and can be used by researchers to evaluate feature selection algorithms.
Scalable Formal Concept Analysis algorithm for large datasets using Spark
Jul 06, 2018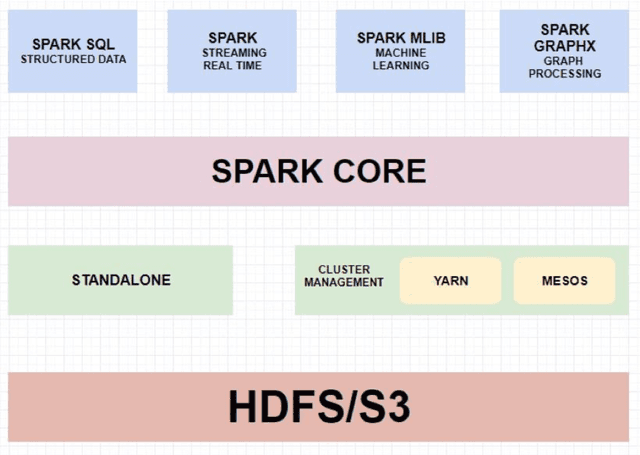
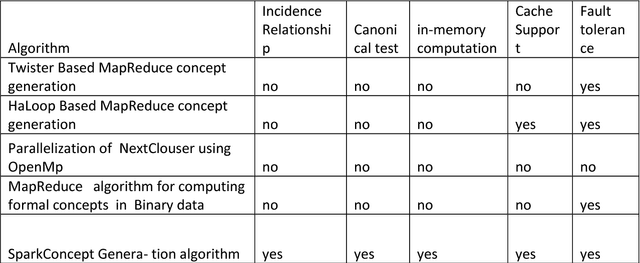
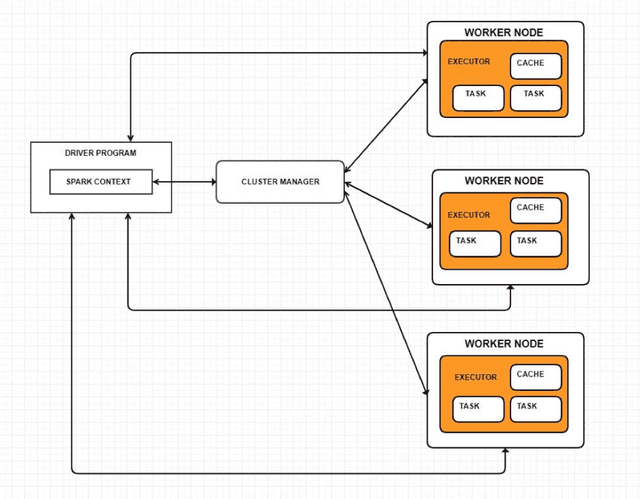
In the process of knowledge discovery and representation in large datasets using formal concept analysis, complexity plays a major role in identifying all the formal concepts and constructing the concept lattice(digraph of the concepts). For identifying the formal concepts and constructing the digraph from the identified concepts in very large datasets, various distributed algorithms are available in the literature. However, the existing distributed algorithms are not very well suitable for concept generation because it is an iterative process. The existing algorithms are implemented using distributed frameworks like MapReduce and Open MP, these frameworks are not appropriate for iterative applications. Hence, in this paper we proposed efficient distributed algorithms for both formal concept generation and concept lattice digraph construction in large formal contexts using Apache Spark. Various performance metrics are considered for the evaluation of the proposed work, the results of the evaluation proves that the proposed algorithms are efficient for concept generation and lattice graph construction in comparison with the existing algorithms.
Lattice based Conceptual Spaces to Explore Cognitive Functionalities for Prosthetic Arm
Jul 05, 2018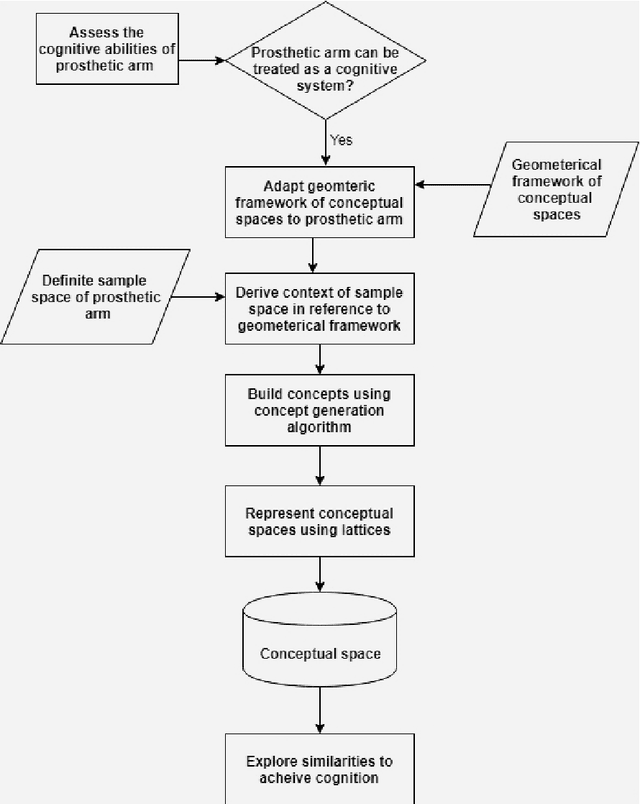

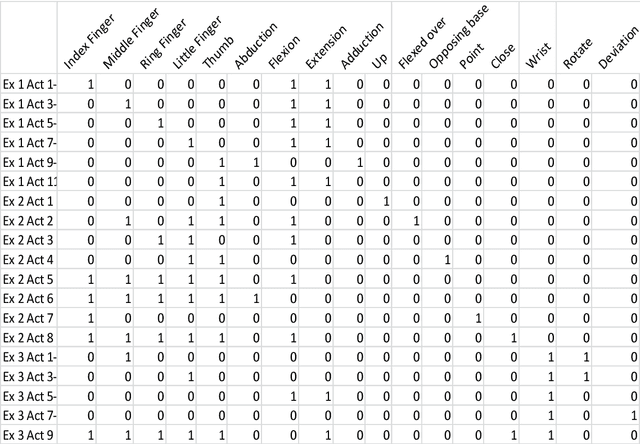
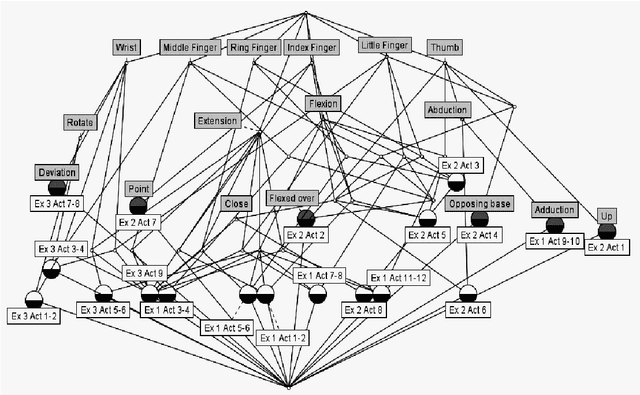
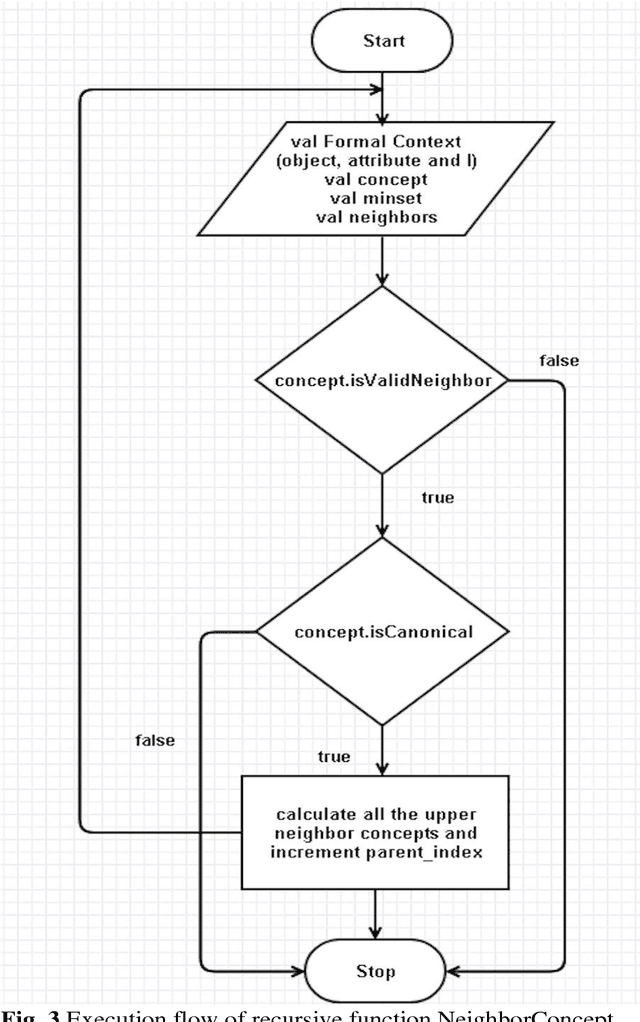
Upper limb Prosthetic can be viewed as an independent cognitive system in order to develop a conceptual space. In this paper, we provide a detailed analogical reasoning of prosthetic arm to build the conceptual spaces with the help of the theory called geometric framework of conceptual spaces proposed by Gardenfors. Terminologies of conceptual spaces such as concepts, similarities, properties, quality dimensions and prototype are applied for a specific prosthetic system and conceptual space is built for prosthetic arm. Concept lattice traversals are used on the lattice represented conceptual spaces. Cognitive functionalities such as generalization (Similarities) and specialization (Differences) are achieved in the lattice represented conceptual space. This might well prove to design intelligent prosthetics to assist challenged humans. Geometric framework of conceptual spaces holds similar concepts closer in geometric structures in a way similar to concept lattices. Hence, we also propose to use concept lattice to represent concepts of geometric framework of conceptual spaces. Also, we extend our discussion with our insights on conceptual spaces of bidirectional hand prosthetics.
Quantum aspects of high dimensional formal representation of conceptual spaces
Jun 29, 2018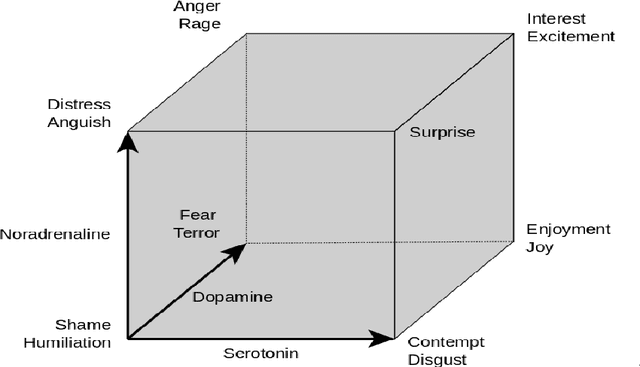
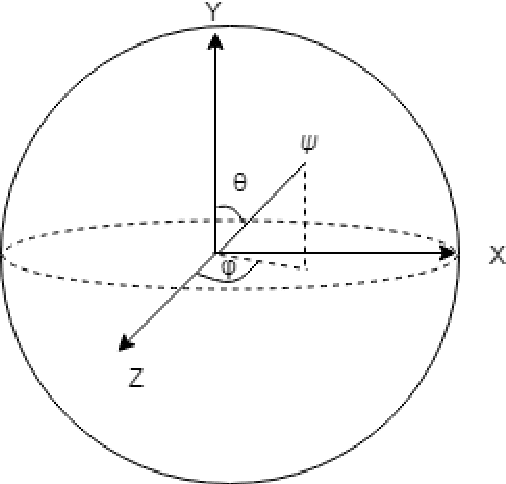
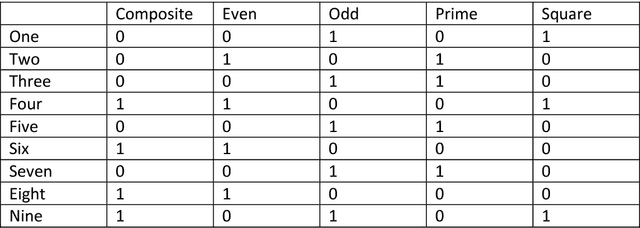
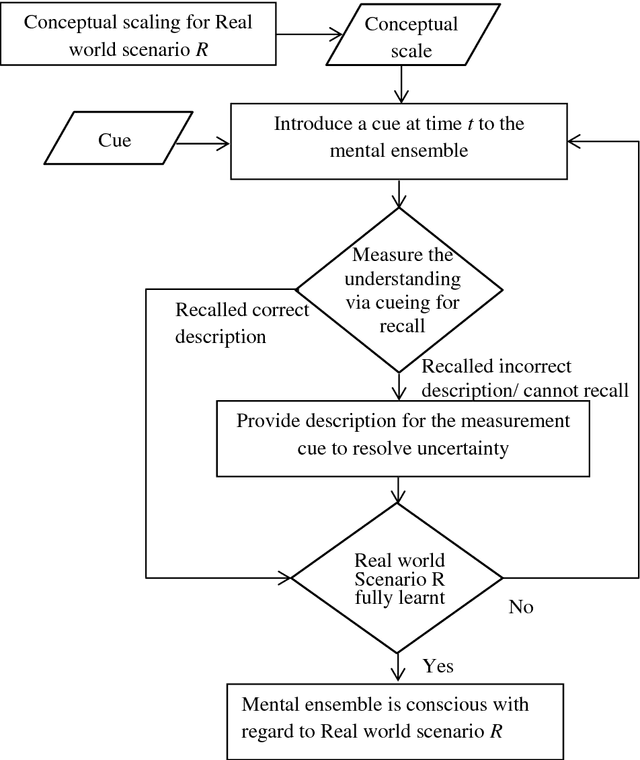
Human cognition is a complex process facilitated by the intricate architecture of human brain. However, human cognition is often reduced to quantum theory based events in principle because of their correlative conjectures for the purpose of analysis for reciprocal understanding. In this paper, we begin our analysis of human cognition via formal methods and proceed towards quantum theories. Human cognition often violate classic probabilities on which formal representation of conceptual spaces are built. Further, geometric representation of conceptual spaces proposed by Gardenfors discusses the underlying content but lacks a systematic approach (Gardenfors, 2000; Kitto et. al, 2012). However, the aforementioned views are not contradictory but different perspective with a gap towards sufficient understanding of human cognitive process. A comprehensive and systematic approach to model a relatively complex scenario can be addressed by vector space approach of conceptual spaces as discussed in literature. In this research, we have proposed an approach that uses both formal representation and Gardenfors geometric approach. The proposed model of high dimensional formal representation of conceptual space is mathematically analysed and inferred to exhibit quantum aspects. Also, the proposed model achieves cognition, in particular, consciousness. We have demonstrated this process of achieving consciousness with a constructive learning scenario. We have also proposed an algorithm for conceptual scaling of a real world scenario under different quality dimensions to obtain a conceptual scale.