 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Space Reinforcement Learning for Multi-Robot Exploration
Jan 03, 2026Autonomous mapping of unknown environments is a critical challenge, particularly in scenarios where time is limited. Multi-agent systems can enhance efficiency through collaboration, but the scalability of motion-planning algorithms remains a key limitation. Reinforcement learning has been explored as a solution, but existing approaches are constrained by the limited input size required for effective learning, restricting their applicability to discrete environments. This work addresses that limitation by leveraging autoencoders to perform dimensionality reduction, compressing high-fidelity occupancy maps into latent state vectors while preserving essential spatial information. Additionally, we introduce a novel procedural generation algorithm based on Perlin noise, designed to generate topologically complex training environments that simulate asteroid fields, caves and forests. These environments are used for training the autoencoder and the navigation algorithm using a hierarchical deep reinforcement learning framework for decentralized coordination. We introduce a weighted consensus mechanism that modulates reliance on shared data via a tuneable trust parameter, ensuring robustness to accumulation of errors. Experimental results demonstrate that the proposed system scales effectively with number of agents and generalizes well to unfamiliar, structurally distinct environments and is resilient in communication-constrained settings.
Closing Speed Computation using Stereo Camera and Applications in Unsignalized T-Intersection
Dec 30, 2024



This letter presents a conflict resolution strategy for an autonomous vehicle mounted with a stereo camera approaching an unsignalized T-intersection. A mathematical model for uncertainty in stereo camera depth measurements is considered and an analysis establishes the proposed adaptive depth sampling logic which guarantees an upper bound on the computed closing speed. Further, a collision avoidance logic is proposed that utilizes the closing speed bound and generates a safe trajectory plan based on the convex hull property of a quadratic B\'ezier curve-based reference path. Realistic validation studies are presented with neighboring vehicle trajectories generated using Next Generation Simulation (NGSIM) dataset.
Quadrotor Guidance for Window Traversal: A Bearings-Only Approach
Oct 18, 2024


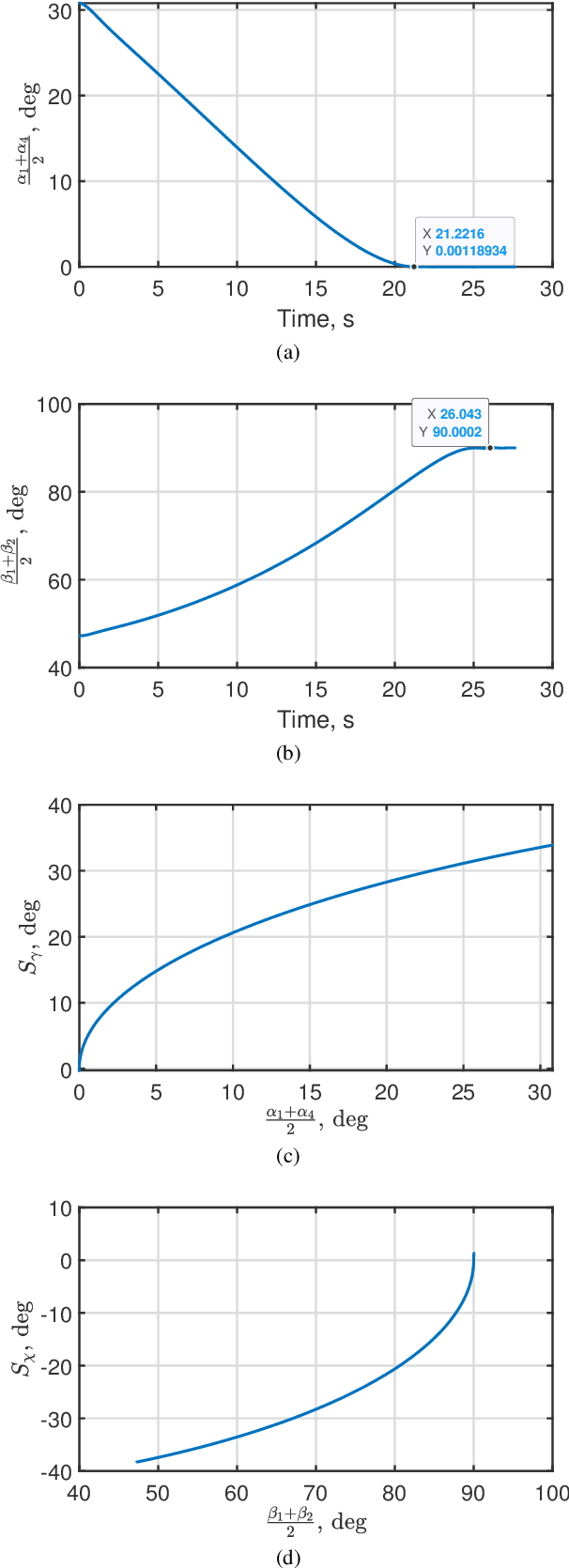
This paper focuses on developing a bearings-only measurement-based three-dimensional window traversal guidance method for quadrotor Uninhabitated Aerial Vehicles (UAVs). The desired flight path and heading angles of the quadrotor are proposed as functions of the bearing angle information of the four vertices of the window. These angular guidance inputs employ a bearing angle bisector term and an elliptic shaping angle term, which directs the quadrotor towards the centroid of the window. Detailed stability analysis of the resulting kinematics demonstrates that all quadrotor trajectories lead to the centroid of the window along a direction which is normal to the window plane. A qualitative comparison with existing traversal methodologies showcases the superiority of the proposed guidance approach with regard to the nature of information, computations for generating the guidance commands, and flexibility of replanning the traversal path. Realistic simulations considering six degree-of-freedom quadrotor model and Monte Carlo studies validate the effectiveness, accuracy, and robustness of the proposed guidance solution. Representative flight validation trials are carried out using an indoor motion capture system.
CORRIDRONE: Corridors for Drones, An Adaptive On-Demand Multi-Lane Design and Testbed
Dec 02, 2020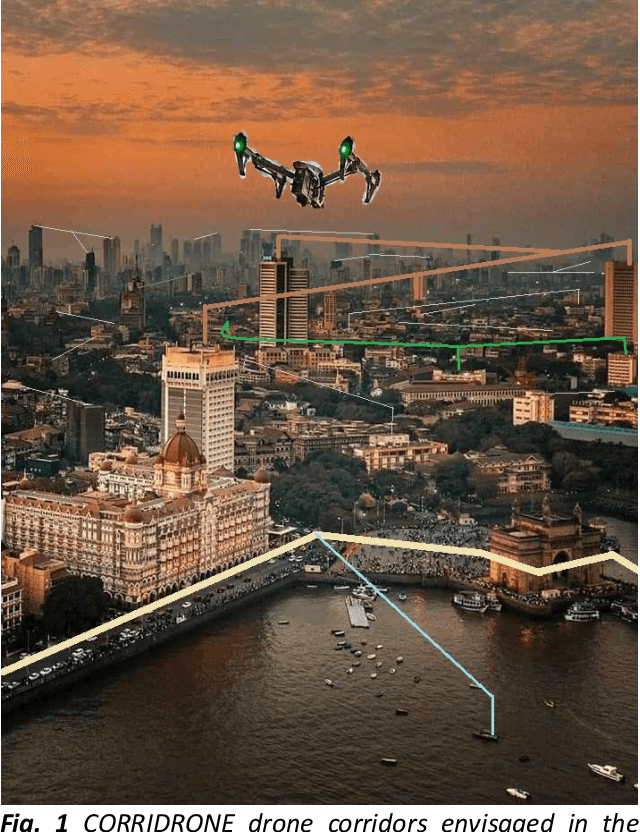
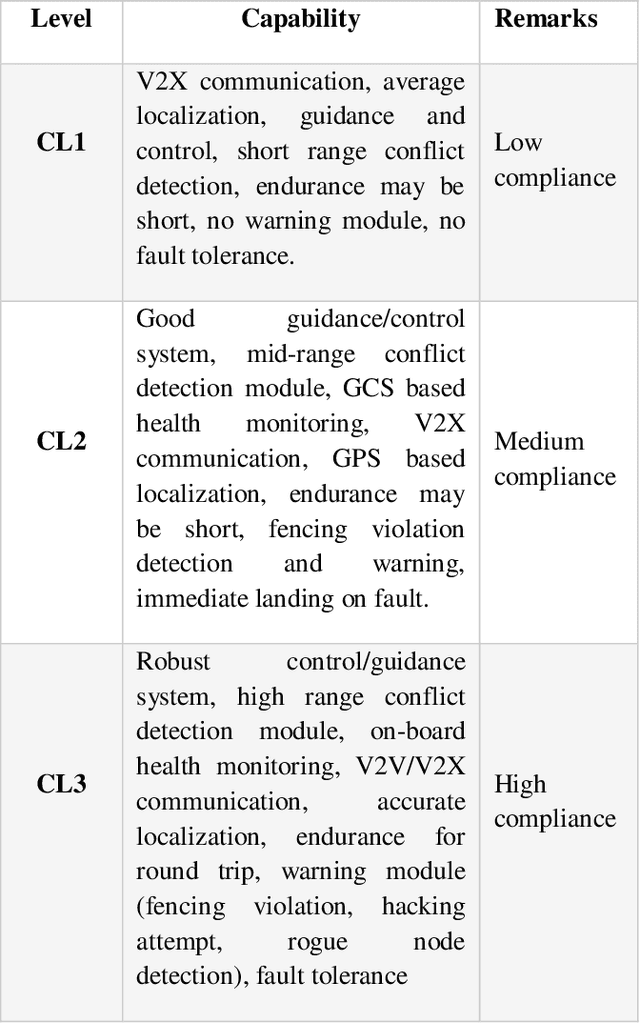
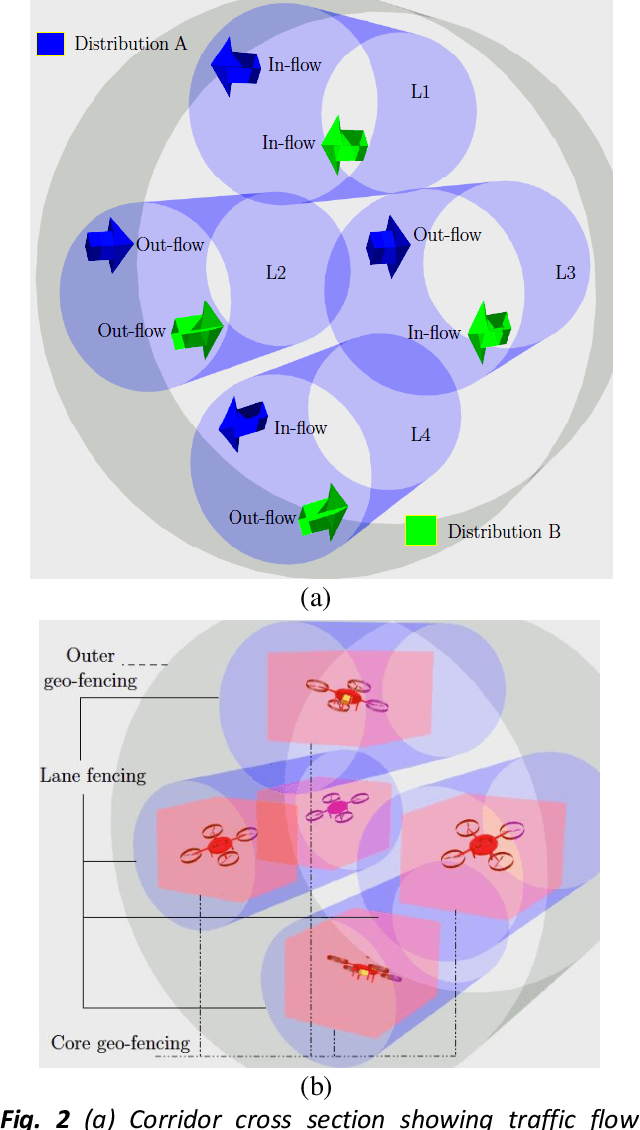
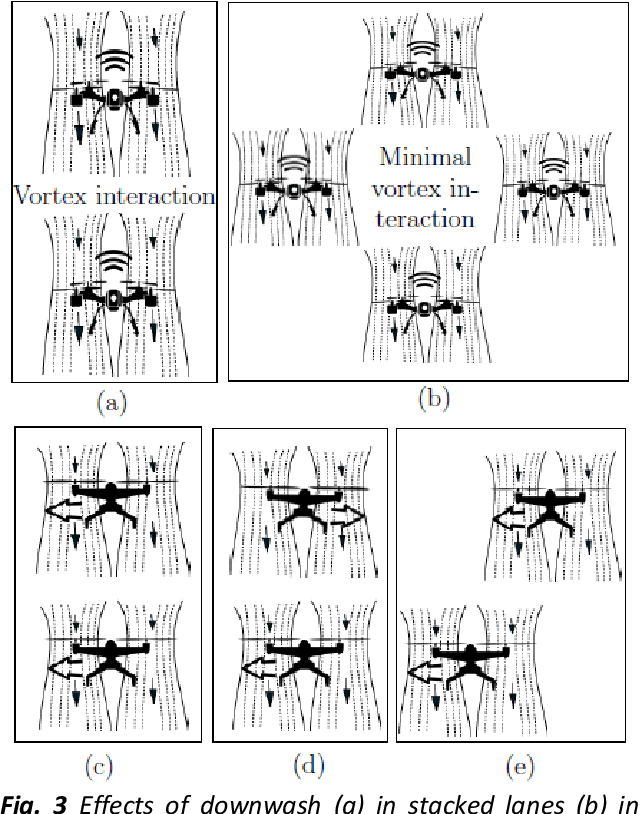
In this article, a novel drone skyway framework called CORRIDRONE is proposed. As the name suggests, this represents virtual air corridors for point-to-point safe passage of multiple drones. The corridors are not permanent but can be set up on demand. A few such scenarios could be those in warehouse/factory floors, package delivery, shore-to-ship delivery, border patrol, etc. Several factors play major roles in the planning and design of such aerial passages. The proposed framework includes many novel features which aid safe and efficient integration of UAVs into the airspace with already available technologies. A several kilometres long test bed is proposed to be set-up at the 1500 acres Challekere campus of Indian Institute of Science, in the state of Karnataka, to design and test the infrastructure required for CORRIDRONE.