 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePluto: Motion Detection for Navigation in a VR Headset
Aug 11, 2021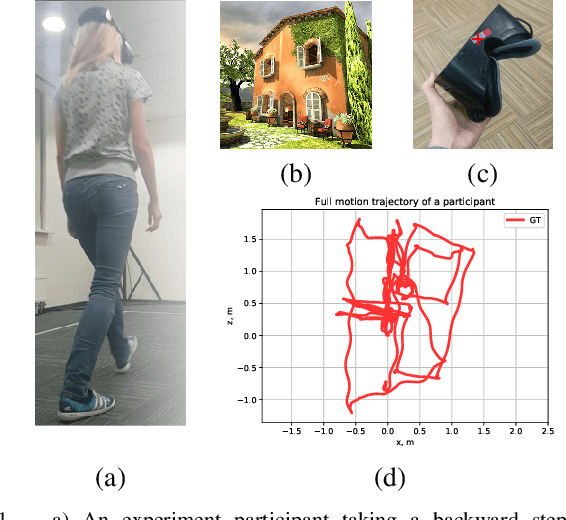
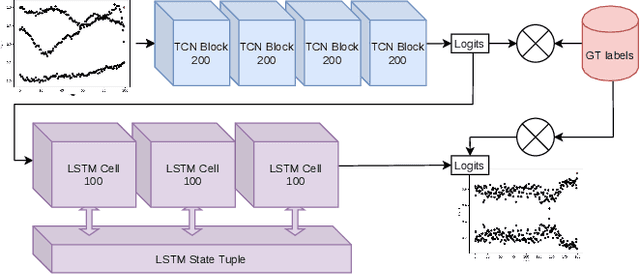
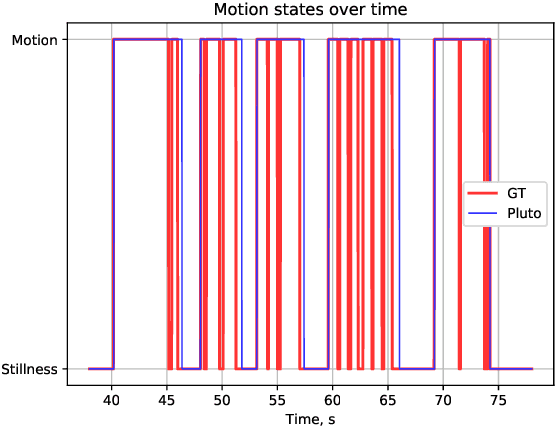
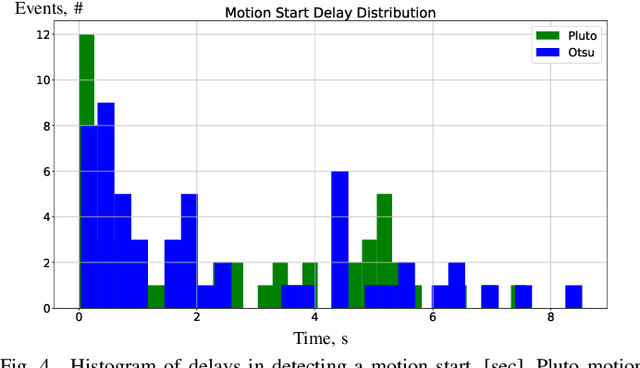
Untethered, inside-out tracking is considered a new goalpost for virtual reality, which became attainable with advent of machine learning in SLAM. Yet computer vision-based navigation is always at risk of a tracking failure due to poor illumination or saliency of the environment. An extension for a navigation system is proposed, which recognizes agents motion and stillness states with 87% accuracy from accelerometer data. 40% reduction in navigation drift is demonstrated in a repeated tracking failure scenario on a challenging dataset.
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude
Aug 15, 2011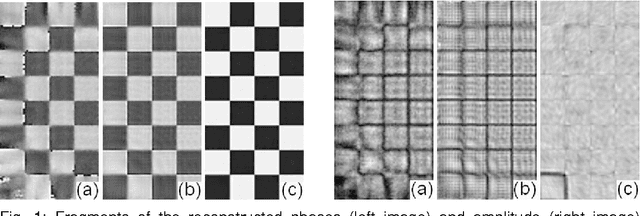

Sparse modeling is one of the efficient techniques for imaging that allows recovering lost information. In this paper, we present a novel iterative phase-retrieval algorithm using a sparse representation of the object amplitude and phase. The algorithm is derived in terms of a constrained maximum likelihood, where the wave field reconstruction is performed using a number of noisy intensity-only observations with a zero-mean additive Gaussian noise. The developed algorithm enables the optimal solution for the object wave field reconstruction. Our goal is an improvement of the reconstruction quality with respect to the conventional algorithms. Sparse regularization results in advanced reconstruction accuracy, and numerical simulations demonstrate significant enhancement of imaging.