 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Optimisation with Prior Reuse for Motion Planning in Robot Soccer
Oct 18, 2017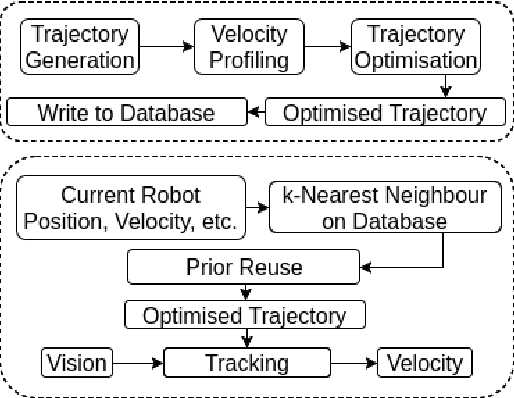
We integrate learning and motion planning for soccer playing differential drive robots using Bayesian optimisation. Trajectories generated using end-slope cubic Bezier splines are first optimised globally through Bayesian optimisation for a set of candidate points with obstacles. The optimised trajectories along with robot and obstacle positions and velocities are stored in a database. The closest planning situation is identified from the database using k-Nearest Neighbour approach. It is further optimised online through reuse of prior information from previously optimised trajectory. Our approach reduces computation time of trajectory optimisation considerably. Velocity profiling generates velocities consistent with robot kinodynamoic constraints, and avoids collision and slipping. Extensive testing is done on developed simulator, as well as on physical differential drive robots. Our method shows marked improvements in mitigating tracking error, and reducing traversal and computational time over competing techniques under the constraints of performing tasks in real time.