 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForward-Looking Sonar Patch Matching: Modern CNNs, Ensembling, and Uncertainty
Aug 02, 2021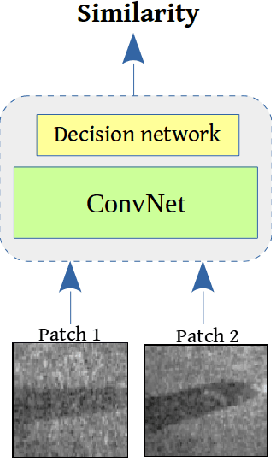
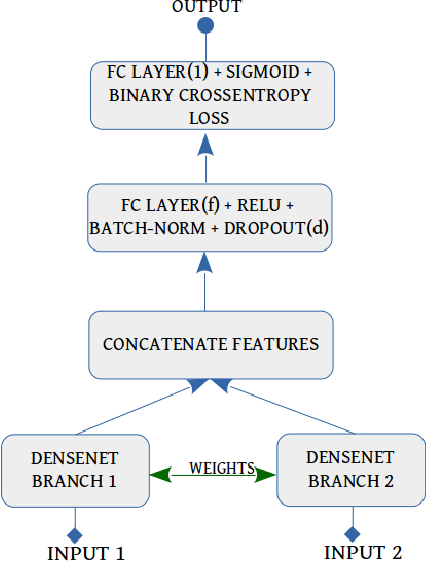
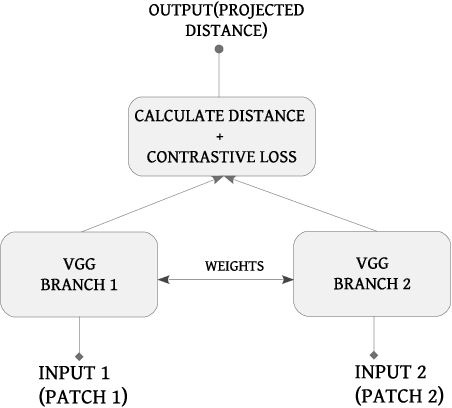
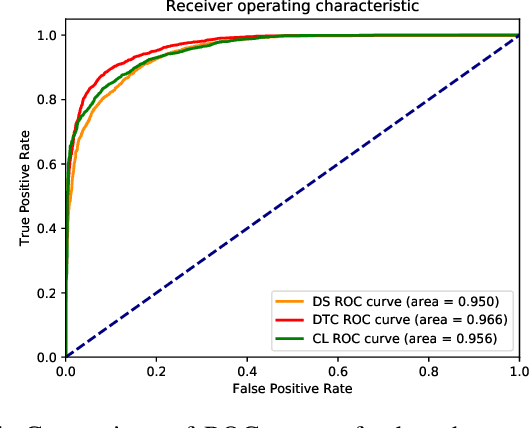
Application of underwater robots are on the rise, most of them are dependent on sonar for underwater vision, but the lack of strong perception capabilities limits them in this task. An important issue in sonar perception is matching image patches, which can enable other techniques like localization, change detection, and mapping. There is a rich literature for this problem in color images, but for acoustic images, it is lacking, due to the physics that produce these images. In this paper we improve on our previous results for this problem (Valdenegro-Toro et al, 2017), instead of modeling features manually, a Convolutional Neural Network (CNN) learns a similarity function and predicts if two input sonar images are similar or not. With the objective of improving the sonar image matching problem further, three state of the art CNN architectures are evaluated on the Marine Debris dataset, namely DenseNet, and VGG, with a siamese or two-channel architecture, and contrastive loss. To ensure a fair evaluation of each network, thorough hyper-parameter optimization is executed. We find that the best performing models are DenseNet Two-Channel network with 0.955 AUC, VGG-Siamese with contrastive loss at 0.949 AUC and DenseNet Siamese with 0.921 AUC. By ensembling the top performing DenseNet two-channel and DenseNet-Siamese models overall highest prediction accuracy obtained is 0.978 AUC, showing a large improvement over the 0.91 AUC in the state of the art.