 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind the ground: A Power Spectral Density-based estimator for all-terrain rovers
Oct 14, 2019
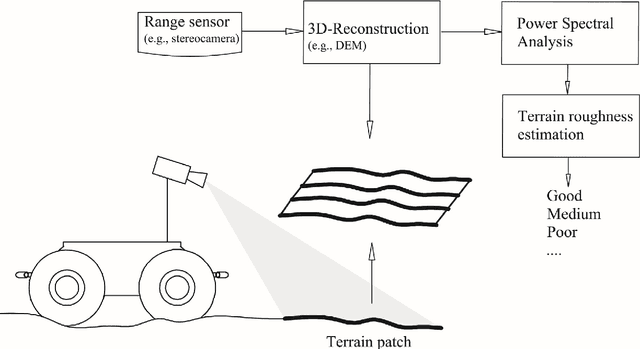
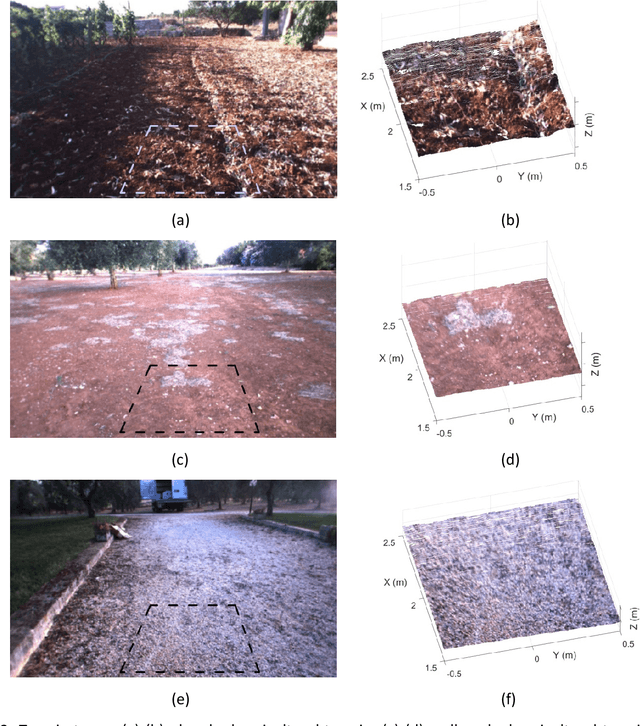
There is a growing interest in new sensing technologies and processing algorithms to increase the level of driving automation towards self-driving vehicles. The challenge for autonomy is especially difficult for the negotiation of uncharted scenarios, including natural terrain. This paper proposes a method for terrain unevenness estimation that is based on the power spectral density (PSD) of the surface profile as measured by exteroceptive sensing, that is, by using a common onboard range sensor such as a stereoscopic camera. Using these components, the proposed estimator can evaluate terrain on-line during normal operations. PSD-based analysis provides insight not only on the magnitude of irregularities, but also on how these irregularities are distributed at various wavelengths. A feature vector can be defined to classify roughness that is proved a powerful statistical tool for the characterization of a given terrain fingerprint showing a limited sensitivity to vehicle tilt rotations. First, the theoretical foundations behind the PSD-based estimator are presented. Then, the system is validated in the field using an all-terrain rover that operates on various natural surfaces. It is shown its potential for automatic ground harshness estimation and, in general, for the development of driving assistance systems.
* 26 pages