 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom RGB images to Dynamic Movement Primitives for planar tasks
Mar 06, 2023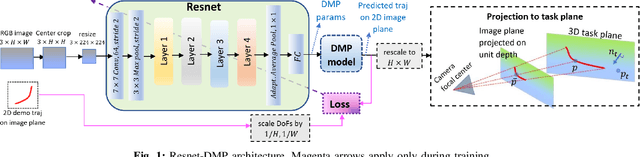
DMP have been extensively applied in various robotic tasks thanks to their generalization and robustness properties. However, the successful execution of a given task may necessitate the use of different motion patterns that take into account not only the initial and target position but also features relating to the overall structure and layout of the scene. To make DMP applicable in wider range of tasks and further automate their use, we design in this work a framework combining deep residual networks with DMP, that can encapsulate different motion patterns of a planar task, provided through human demonstrations on the RGB image plane. We can then automatically infer from new raw RGB visual input the appropriate DMP parameters, i.e. the weights that determine the motion pattern and the initial/target positions. We experimentally validate our method in the task of unveiling the stem of a grape-bunch from occluding leaves using on a mock-up vine setup and compare it to another SoA method for inferring DMP from images.
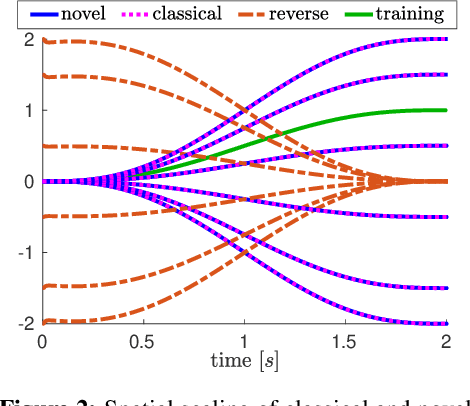
Efficient DMP generalization to time-varying targets, external signals and via-points
Dec 27, 2022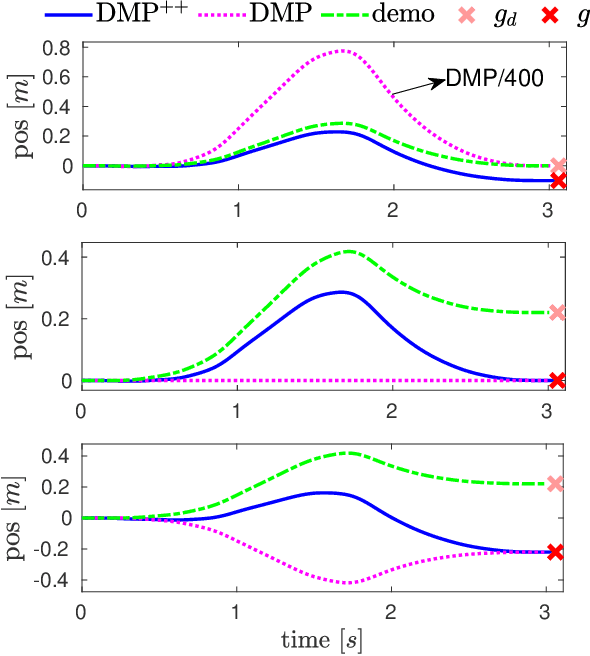

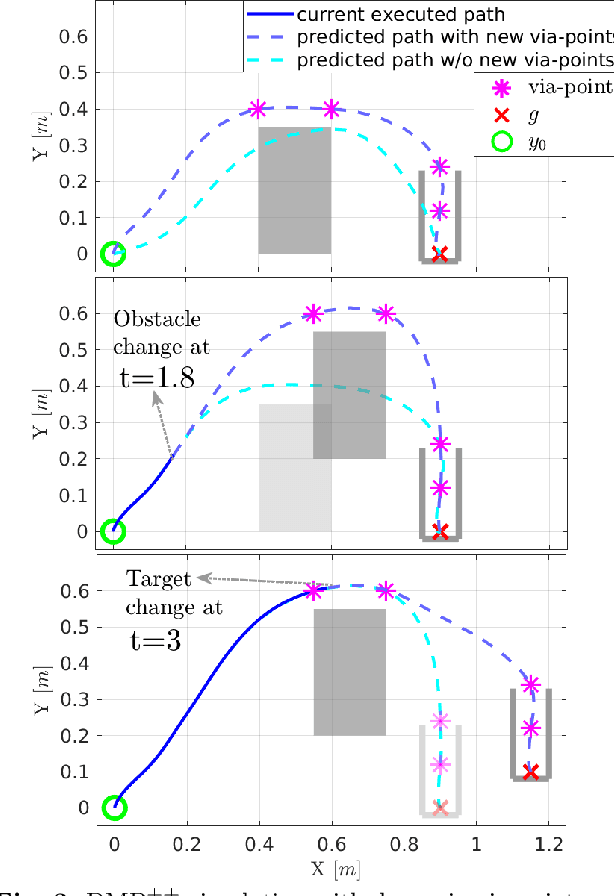
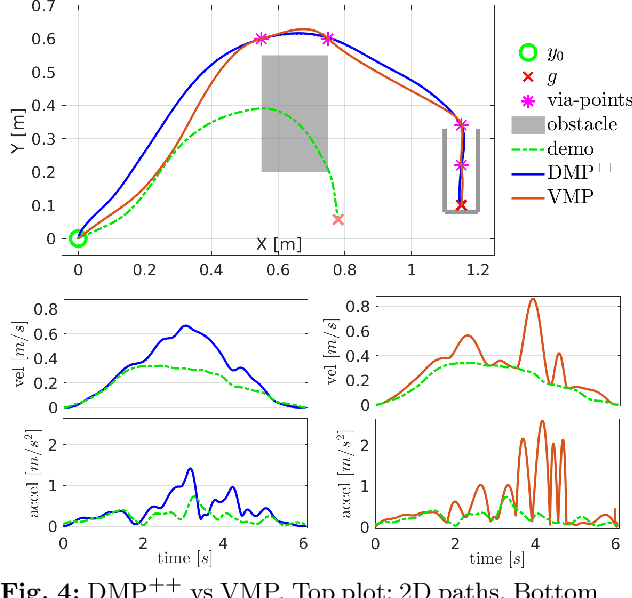
Dynamic Movement Primitives (DMP) have found remarkable applicability and success in various robotic tasks, which can be mainly attributed to their generalization and robustness properties. Nevertheless, their generalization is based only on the trajectory endpoints (initial and target position). Moreover, the spatial generalization of DMP is known to suffer from shortcomings like over-scaling and mirroring of the motion. In this work we propose a novel generalization scheme, based on optimizing online the DMP weights so that the acceleration profile and hence the underlying training trajectory pattern is preserved. This approach remedies the shortcomings of the classical DMP scaling and additionally allows the DMP to generalize also to intermediate points (via-points) and external signals (coupling terms), while preserving the training trajectory pattern. Extensive comparative simulations with the classical and other DMP variants are conducted, while experimental results validate the applicability and efficacy of the proposed method.
Human-robot collaborative object transfer using human motion prediction based on Cartesian pose Dynamic Movement Primitives
Apr 07, 2021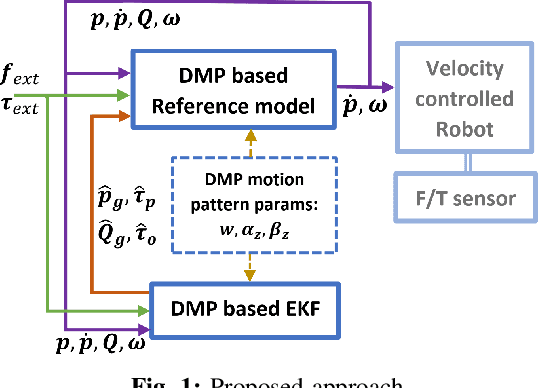

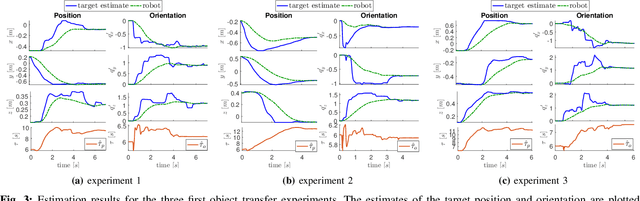
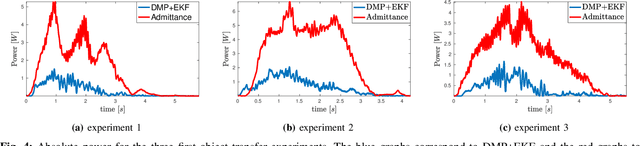
In this work, the problem of human-robot collaborative object transfer to unknown target poses is addressed. The desired pattern of the end-effector pose trajectory to a known target pose is encoded using DMPs (Dynamic Movement Primitives). During transportation of the object to new unknown targets, a DMP-based reference model and an EKF (Extended Kalman Filter) for estimating the target pose and time duration of the human's intended motion is proposed. A stability analysis of the overall scheme is provided. Experiments using a Kuka LWR4+ robot equipped with an ATI sensor at its end-effector validate its efficacy with respect to the required human effort and compare it with an admittance control scheme.
A Reversible Dynamic Movement Primitive formulation
Oct 15, 2020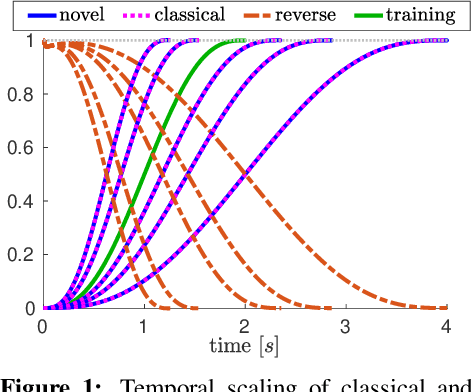
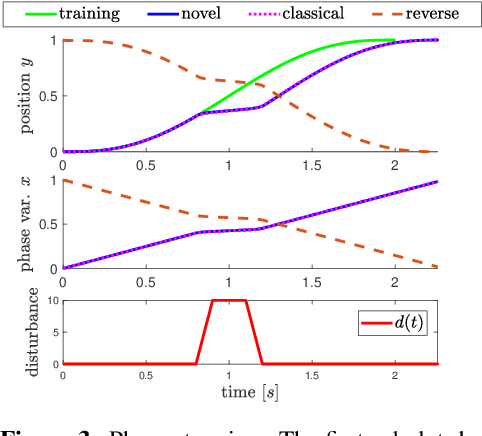
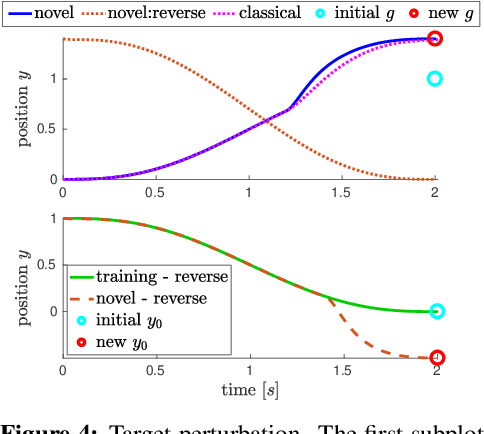
In this work, a novel Dynamic Movement Primitive (DMP) formulation is proposed which supports reversibility, i.e. backwards reproduction of a learned trajectory, while also sharing all favourable properties of classical DMP. Classical DMP have been extensively used for encoding and reproducing a desired motion pattern in several robotic applications. However, they lack reversibility, which is a useful and expedient property that can be leveraged in many scenarios. The proposed formulation is analyzed theoretically and is validated through simulations and experiments.