 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Inversion turns CLIP into a Decoder
May 29, 2025CLIP is a discriminative model trained to align images and text in a shared embedding space. Due to its multimodal structure, it serves as the backbone of many generative pipelines, where a decoder is trained to map from the shared space back to images. In this work, we show that image synthesis is nevertheless possible using CLIP alone -- without any decoder, training, or fine-tuning. Our approach optimizes a frequency-aware implicit neural representation that encourages coarse-to-fine generation by stratifying frequencies across network layers. To stabilize this inverse mapping, we introduce adversarially robust initialization, a lightweight Orthogonal Procrustes projection to align local text and image embeddings, and a blending loss that anchors outputs to natural image statistics. Without altering CLIP's weights, this framework unlocks capabilities such as text-to-image generation, style transfer, and image reconstruction. These findings suggest that discriminative models may hold untapped generative potential, hidden in plain sight.
Environment Maps Editing using Inverse Rendering and Adversarial Implicit Functions
Oct 24, 2024
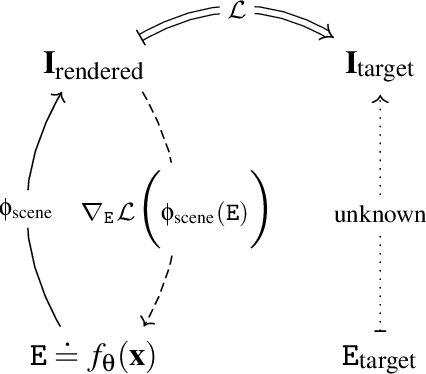

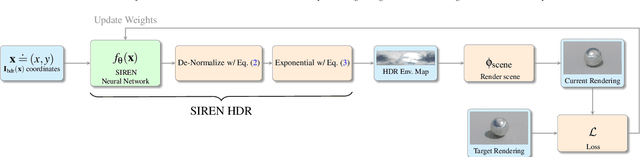
Editing High Dynamic Range (HDR) environment maps using an inverse differentiable rendering architecture is a complex inverse problem due to the sparsity of relevant pixels and the challenges in balancing light sources and background. The pixels illuminating the objects are a small fraction of the total image, leading to noise and convergence issues when the optimization directly involves pixel values. HDR images, with pixel values beyond the typical Standard Dynamic Range (SDR), pose additional challenges. Higher learning rates corrupt the background during optimization, while lower learning rates fail to manipulate light sources. Our work introduces a novel method for editing HDR environment maps using a differentiable rendering, addressing sparsity and variance between values. Instead of introducing strong priors that extract the relevant HDR pixels and separate the light sources, or using tricks such as optimizing the HDR image in the log space, we propose to model the optimized environment map with a new variant of implicit neural representations able to handle HDR images. The neural representation is trained with adversarial perturbations over the weights to ensure smooth changes in the output when it receives gradients from the inverse rendering. In this way, we obtain novel and cheap environment maps without relying on latent spaces of expensive generative models, maintaining the original visual consistency. Experimental results demonstrate the method's effectiveness in reconstructing the desired lighting effects while preserving the fidelity of the map and reflections on objects in the scene. Our approach can pave the way to interesting tasks, such as estimating a new environment map given a rendering with novel light sources, maintaining the initial perceptual features, and enabling brush stroke-based editing of existing environment maps.