 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom-Key Metaheuristic and Linearization for the Quadratic Multiple Constraints Variable-Sized Bin Packing Problem
Nov 15, 2025This paper addresses the Quadratic Multiple Constraints Variable-Sized Bin Packing Problem (QMC-VSBPP), a challenging combinatorial optimization problem that generalizes the classical bin packing by incorporating multiple capacity dimensions, heterogeneous bin types, and quadratic interaction costs between items. We propose two complementary methods that advance the current state-of-the-art. First, a linearized mathematical formulation is introduced to eliminate quadratic terms, enabling the use of exact solvers such as Gurobi to compute strong lower bounds - reported here for the first time for this problem. Second, we develop RKO-ACO, a continuous-domain Ant Colony Optimization algorithm within the Random-Key Optimization framework, enhanced with adaptive Q-learning parameter control and efficient local search. Extensive computational experiments on benchmark instances show that the proposed linearized model produces significantly tighter lower bounds than the original quadratic formulation, while RKO-ACO consistently matches or improves upon all best-known solutions in the literature, establishing new upper bounds for large-scale instances. These results provide new reference values for future studies and demonstrate the effectiveness of evolutionary and random-key metaheuristic approaches for solving complex quadratic packing problems. Source code and data available at https://github.com/nataliaalves03/RKO-ACO
A Random-Key Optimizer for Combinatorial Optimization
Nov 06, 2024This paper presents the Random-Key Optimizer (RKO), a versatile and efficient stochastic local search method tailored for combinatorial optimization problems. Using the random-key concept, RKO encodes solutions as vectors of random keys that are subsequently decoded into feasible solutions via problem-specific decoders. The RKO framework is able to combine a plethora of classic metaheuristics, each capable of operating independently or in parallel, with solution sharing facilitated through an elite solution pool. This modular approach allows for the adaptation of various metaheuristics, including simulated annealing, iterated local search, and greedy randomized adaptive search procedures, among others. The efficacy of the RKO framework, implemented in C++, is demonstrated through its application to three NP-hard combinatorial optimization problems: the alpha-neighborhood p-median problem, the tree of hubs location problem, and the node-capacitated graph partitioning problem. The results highlight the framework's ability to produce high-quality solutions across diverse problem domains, underscoring its potential as a robust tool for combinatorial optimization.
A random-key GRASP for combinatorial optimization
May 29, 2024This paper proposes a problem-independent GRASP metaheuristic using the random-key optimizer (RKO) paradigm. GRASP (greedy randomized adaptive search procedure) is a metaheuristic for combinatorial optimization that repeatedly applies a semi-greedy construction procedure followed by a local search procedure. The best solution found over all iterations is returned as the solution of the GRASP. Continuous GRASP (C-GRASP) is an extension of GRASP for continuous optimization in the unit hypercube. A random-key optimizer (RKO) uses a vector of random keys to encode a solution to a combinatorial optimization problem. It uses a decoder to evaluate a solution encoded by the vector of random keys. A random-key GRASP is a C-GRASP where points in the unit hypercube are evaluated employing a decoder. We describe random key GRASP consisting of a problem-independent component and a problem-dependent decoder. As a proof of concept, the random-key GRASP is tested on five NP-hard combinatorial optimization problems: traveling salesman problem, tree of hubs location problem, Steiner triple covering problem, node capacitated graph partitioning problem, and job sequencing and tool switching problem.
Simple heuristics for the assembly line worker assignment and balancing problem
Feb 22, 2012
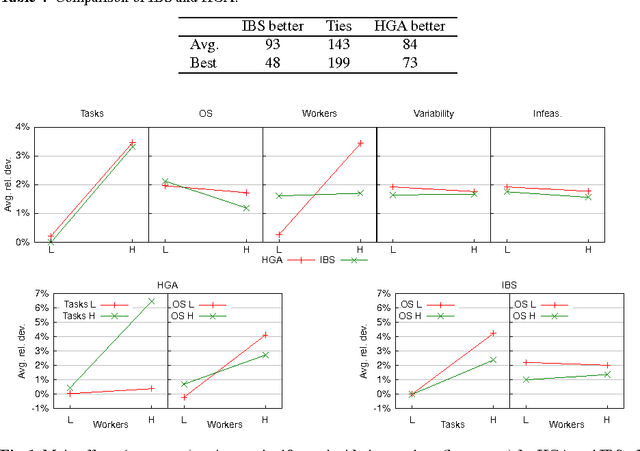
We propose simple heuristics for the assembly line worker assignment and balancing problem. This problem typically occurs in assembly lines in sheltered work centers for the disabled. Different from the classical simple assembly line balancing problem, the task execution times vary according to the assigned worker. We develop a constructive heuristic framework based on task and worker priority rules defining the order in which the tasks and workers should be assigned to the workstations. We present a number of such rules and compare their performance across three possible uses: as a stand-alone method, as an initial solution generator for meta-heuristics, and as a decoder for a hybrid genetic algorithm. Our results show that the heuristics are fast, they obtain good results as a stand-alone method and are efficient when used as a initial solution generator or as a solution decoder within more elaborate approaches.