 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViTaMIn: Learning Contact-Rich Tasks Through Robot-Free Visuo-Tactile Manipulation Interface
Apr 08, 2025Tactile information plays a crucial role for humans and robots to interact effectively with their environment, particularly for tasks requiring the understanding of contact properties. Solving such dexterous manipulation tasks often relies on imitation learning from demonstration datasets, which are typically collected via teleoperation systems and often demand substantial time and effort. To address these challenges, we present ViTaMIn, an embodiment-free manipulation interface that seamlessly integrates visual and tactile sensing into a hand-held gripper, enabling data collection without the need for teleoperation. Our design employs a compliant Fin Ray gripper with tactile sensing, allowing operators to perceive force feedback during manipulation for more intuitive operation. Additionally, we propose a multimodal representation learning strategy to obtain pre-trained tactile representations, improving data efficiency and policy robustness. Experiments on seven contact-rich manipulation tasks demonstrate that ViTaMIn significantly outperforms baseline methods, demonstrating its effectiveness for complex manipulation tasks.
Autonomous Multi-Robot Exploration Strategies for 3D Environments with Fire Detection Capabilitie
Nov 24, 2024This paper presents a comprehensive overview of exploration strategies utilized in both 2D and 3D environments, focusing on autonomous multi-robot systems designed for building exploration and fire detection. We explore the limitations of traditional algorithms that rely on prior knowledge and predefined maps, emphasizing the challenges faced when environments undergo changes that invalidate these maps. Our modular approach integrates localization, mapping, and trajectory planning to facilitate effective exploration using an OctoMap framework generated from point cloud data. The exploration strategy incorporates obstacle avoidance through potential fields, ensuring safe navigation in dynamic settings. Additionally, I propose future research directions, including decentralized map creation, coordinated exploration among unmanned aerial vehicles (UAVs), and adaptations to time-varying environments. This work serves as a foundation for advancing coordinated multi-robot exploration algorithms, enhancing their applicability in real-world scenarios.
Enhanced Monocular Visual Odometry with AR Poses and Integrated INS-GPS for Robust Localization in Urban Environments
Nov 12, 2024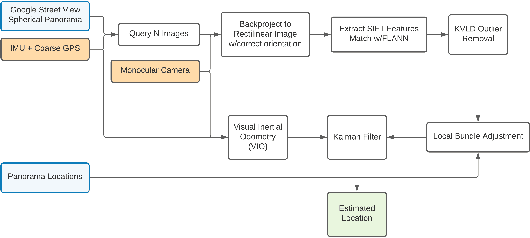


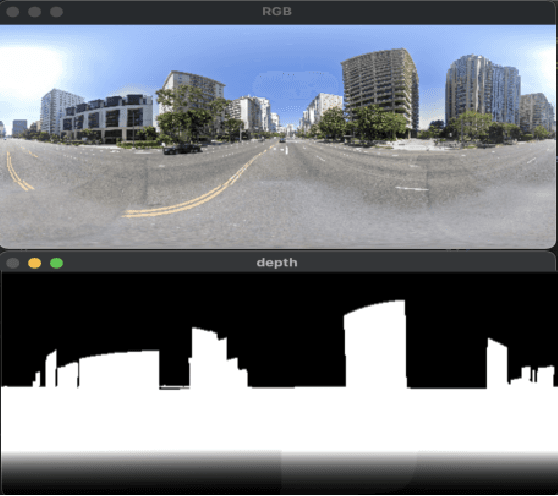
This paper introduces a cost effective localization system combining monocular visual odometry , augmented reality (AR) poses, and integrated INS-GPS data. We address monocular VO scale factor issues using AR poses and enhance accuracy with INS and GPS data, filtered through an Extended Kalman Filter . Our approach, tested using manually annotated trajectories from Google Street View, achieves an RMSE of 1.529 meters over a 1 km track. Future work will focus on real-time mobile implementation and further integration of visual-inertial odometry for robust localization. This method offers lane-level accuracy with minimal hardware, making advanced navigation more accessible.
Self-Supervised Learning For Robust Robotic Grasping In Dynamic Environment
Oct 15, 2024Some of the threats in the dynamic environment include the unpredictability of the motion of objects and interferences to the robotic grasp. In such conditions the traditional supervised and reinforcement learning approaches are ill suited because they rely on a large amount of labelled data and a predefined reward signal. More specifically in this paper we introduce an important and promising framework known as self supervised learning (SSL) whose goal is to apply to the RGBD sensor and proprioceptive data from robot hands in order to allow robots to learn and improve their grasping strategies in real time. The invariant SSL framework overcomes the deficiencies of the fixed labelling by adapting the SSL system to changes in the objects behavior and improving performance in dynamic situations. The above proposed method was tested through various simulations and real world trials, with the series obtaining enhanced grasp success rates of 15% over other existing methods, especially under dynamic scenarios. Also, having tested for adaptation times, it was confirmed that the system could adapt faster, thus applicable for use in the real world, such as in industrial automation and service robotics. In future work, the proposed approach will be expanded to more complex tasks, such as multi object manipulation and functions in the context of cluttered environments, in order to apply the proposed methodology to a broader range of robotic tasks.
Advancements in Gravity Compensation and Control for the da Vinci Surgical Robot
May 17, 2024This research delves into the enhancement of control mechanisms for the da Vinci Surgical System, focusing on the implementation of gravity compensation and refining the modeling of the master and patient side manipulators. Leveraging the Robot Operating System (ROS) the study aimed to fortify the precision and stability of the robots movements essential for intricate surgical procedures. Through rigorous parameter identification and the Euler Lagrange approach the team successfully derived the necessary torque equations and established a robust mathematical model. Implementation of the actual robot and simulation in Gazebo highlighted the efficacy of the developed control strategies facilitating accurate positioning and minimizing drift. Additionally, the project extended its contributions by constructing a comprehensive model for the patient side manipulator laying the groundwork for future research endeavors. This work signifies a significant advancement in the pursuit of enhanced precision and user control in robotic assisted surgeries. NOTE - This work has been submitted to the IEEE R-AL for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.