 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA multi-agent evolutionary robotics framework to train spiking neural networks
Dec 07, 2020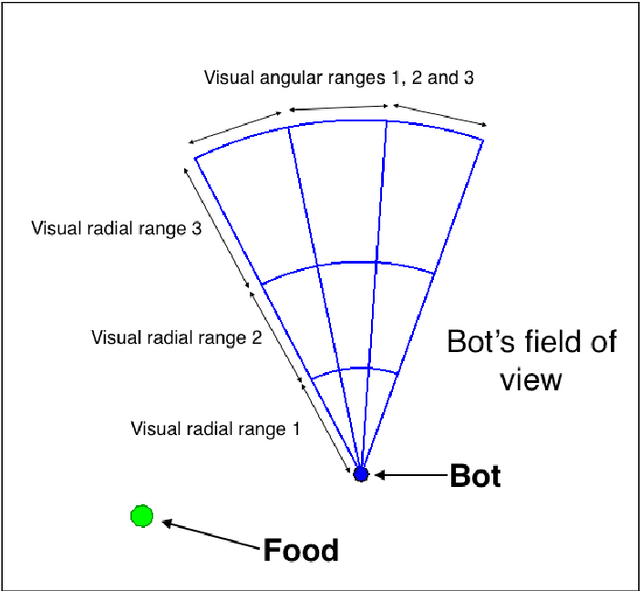
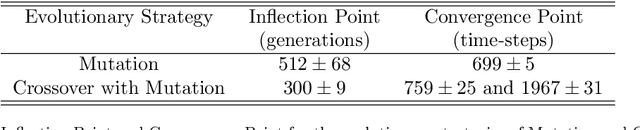
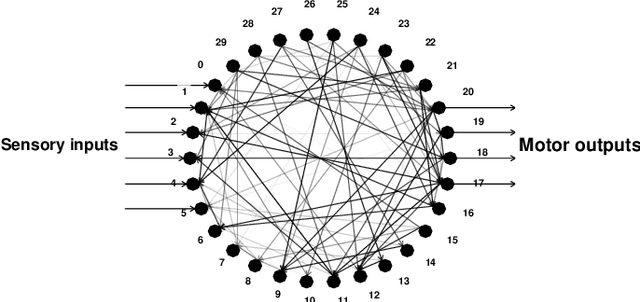
A novel multi-agent evolutionary robotics (ER) based framework, inspired by competitive evolutionary environments in nature, is demonstrated for training Spiking Neural Networks (SNN). The weights of a population of SNNs along with morphological parameters of bots they control in the ER environment are treated as phenotypes. Rules of the framework select certain bots and their SNNs for reproduction and others for elimination based on their efficacy in capturing food in a competitive environment. While the bots and their SNNs are given no explicit reward to survive or reproduce via any loss function, these drives emerge implicitly as they evolve to hunt food and survive within these rules. Their efficiency in capturing food as a function of generations exhibit the evolutionary signature of punctuated equilibria. Two evolutionary inheritance algorithms on the phenotypes, Mutation and Crossover with Mutation, are demonstrated. Performances of these algorithms are compared using ensembles of 100 experiments for each algorithm. We find that Crossover with Mutation promotes 40% faster learning in the SNN than mere Mutation with a statistically significant margin.