 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved detection of discarded fish species through BoxAL active learning
Oct 07, 2024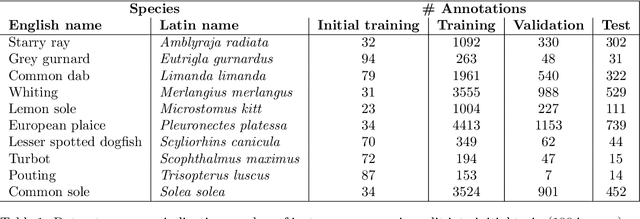
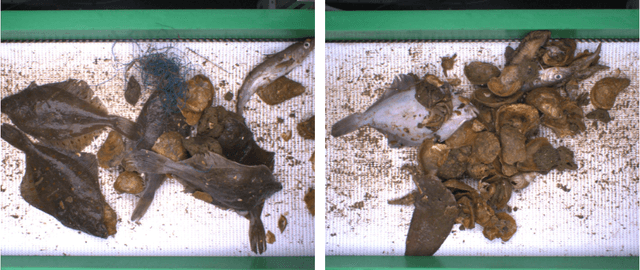
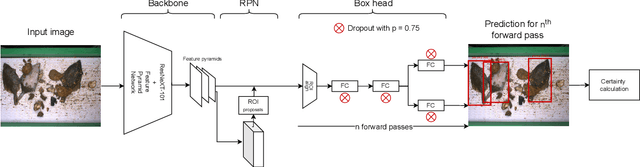
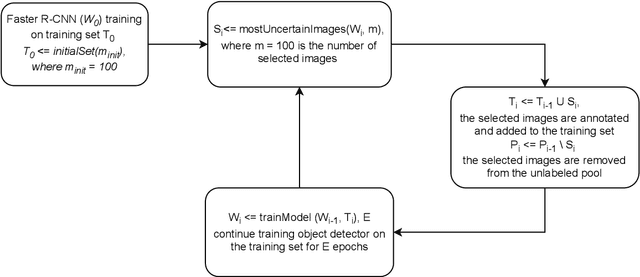
In recent years, powerful data-driven deep-learning techniques have been developed and applied for automated catch registration. However, these methods are dependent on the labelled data, which is time-consuming, labour-intensive, expensive to collect and need expert knowledge. In this study, we present an active learning technique, named BoxAL, which includes estimation of epistemic certainty of the Faster R-CNN object-detection model. The method allows selecting the most uncertain training images from an unlabeled pool, which are then used to train the object-detection model. To evaluate the method, we used an open-source image dataset obtained with a dedicated image-acquisition system developed for commercial trawlers targeting demersal species. We demonstrated, that our approach allows reaching the same object-detection performance as with the random sampling using 400 fewer labelled images. Besides, mean AP score was significantly higher at the last training iteration with 1100 training images, specifically, 39.0±1.6 and 34.8±1.8 for certainty-based sampling and random sampling, respectively. Additionally, we showed that epistemic certainty is a suitable method to sample images that the current iteration of the model cannot deal with yet. Our study additionally showed that the sampled new data is more valuable for training than the remaining unlabeled data. Our software is available on https://github.com/pieterblok/boxal.