 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modal Mapping and Dual-Branch Reconstruction for 2D-3D Multimodal Industrial Anomaly Detection
Mar 04, 2026Multimodal industrial anomaly detection benefits from integrating RGB appearance with 3D surface geometry, yet existing \emph{unsupervised} approaches commonly rely on memory banks, teacher-student architectures, or fragile fusion schemes, limiting robustness under noisy depth, weak texture, or missing modalities. This paper introduces \textbf{CMDR-IAD}, a lightweight and modality-flexible unsupervised framework for reliable anomaly detection in 2D+3D multimodal as well as single-modality (2D-only or 3D-only) settings. \textbf{CMDR-IAD} combines bidirectional 2D$\leftrightarrow$3D cross-modal mapping to model appearance-geometry consistency with dual-branch reconstruction that independently captures normal texture and geometric structure. A two-part fusion strategy integrates these cues: a reliability-gated mapping anomaly highlights spatially consistent texture-geometry discrepancies, while a confidence-weighted reconstruction anomaly adaptively balances appearance and geometric deviations, yielding stable and precise anomaly localization even in depth-sparse or low-texture regions. On the MVTec 3D-AD benchmark, CMDR-IAD achieves state-of-the-art performance while operating without memory banks, reaching 97.3\% image-level AUROC (I-AUROC), 99.6\% pixel-level AUROC (P-AUROC), and 97.6\% AUPRO. On a real-world polyurethane cutting dataset, the 3D-only variant attains 92.6\% I-AUROC and 92.5\% P-AUROC, demonstrating strong effectiveness under practical industrial conditions. These results highlight the framework's robustness, modality flexibility, and the effectiveness of the proposed fusion strategies for industrial visual inspection. Our source code is available at https://github.com/ECGAI-Research/CMDR-IAD/
PLANE: An Extensible Open Source Framework for modeling the Internet of Drones
Jun 19, 2019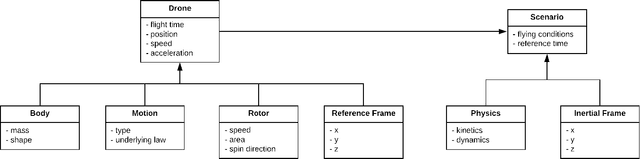
Python Library for simulating unManNed vehiclEs(PLANE) is an open source software module, written in Python, that focuses on Unmanned Aerial Vehicles (UAVs), on their movements and on the mechanics of flight, thus devoting particular attention to the equations that describe drones' movement. In the context of the Internet of Drones (IoD), the module can be widely used for the study of the mutual control of position/coordination in scenarios in which drones may find obstacles, as it happens in densely populated urban scenarios. Emphasis is put on ease of use, performance evaluation, documentation, and Application Programming Interface (API) consistency. The software tool has minimal dependencies and is distributed under MIT License. Source code, binaries, and documentation can be downloaded from GitHub.