 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWater Quality Prediction on a Sigfox-compliant IoT Device: The Road Ahead of WaterS
Jul 27, 2020



Water pollution is a critical issue that can affects humans' health and the entire ecosystem thus inducing economical and social concerns. In this paper, we focus on an Internet of Things water quality prediction system, namely WaterS, that can remotely communicate the gathered measurements leveraging Low-Power Wide Area Network technologies. The solution addresses the water pollution problem while taking into account the peculiar Internet of Things constraints such as energy efficiency and autonomy as the platform is equipped with a photovoltaic cell. At the base of our solution, there is a Long Short-Term Memory recurrent neural network used for time series prediction. It results as an efficient solution to predict water quality parameters such as pH, conductivity, oxygen, and temperature. The water quality parameters measurements involved in this work are referred to the Tiziano Project dataset in a reference time period spanning from 2007 to 2012. The LSTM applied to predict the water quality parameters achieves high accuracy and a low Mean Absolute Error of 0.20, a Mean Square Error of 0.092, and finally a Cosine Proximity of 0.94. The obtained results were widely analyzed in terms of protocol suitability and network scalability of the current architecture towards large-scale deployments. From a networking perspective, with an increasing number of Sigfox-enabling end-devices, the Packet Error Rate increases as well up to 4% with the largest envisioned deployment. Finally, the source code of WaterS ecosystem has been released as open-source, to encourage and promote research activities from both Industry and Academia.
PLANE: An Extensible Open Source Framework for modeling the Internet of Drones
Jun 19, 2019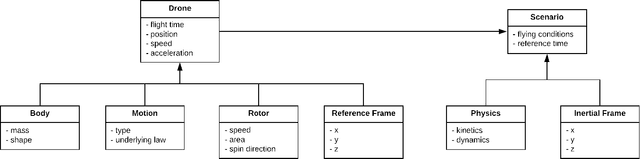
Python Library for simulating unManNed vehiclEs(PLANE) is an open source software module, written in Python, that focuses on Unmanned Aerial Vehicles (UAVs), on their movements and on the mechanics of flight, thus devoting particular attention to the equations that describe drones' movement. In the context of the Internet of Drones (IoD), the module can be widely used for the study of the mutual control of position/coordination in scenarios in which drones may find obstacles, as it happens in densely populated urban scenarios. Emphasis is put on ease of use, performance evaluation, documentation, and Application Programming Interface (API) consistency. The software tool has minimal dependencies and is distributed under MIT License. Source code, binaries, and documentation can be downloaded from GitHub.