 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechatronic Generation of Datasets for Acoustics Research
Oct 01, 2023We address the challenge of making spatial audio datasets by proposing a shared mechanized recording space that can run custom acoustic experiments: a Mechatronic Acoustic Research System (MARS). To accommodate a wide variety of experiments, we implement an extensible architecture for wireless multi-robot coordination which enables synchronized robot motion for dynamic scenes with moving speakers and microphones. Using a virtual control interface, we can remotely design automated experiments to collect large-scale audio data. This data is shown to be similar across repeated runs, demonstrating the reliability of MARS. We discuss the potential for MARS to make audio data collection accessible for researchers without dedicated acoustic research spaces.
Uncoded Binary Signaling through Modulo AWGN Channel
May 20, 2021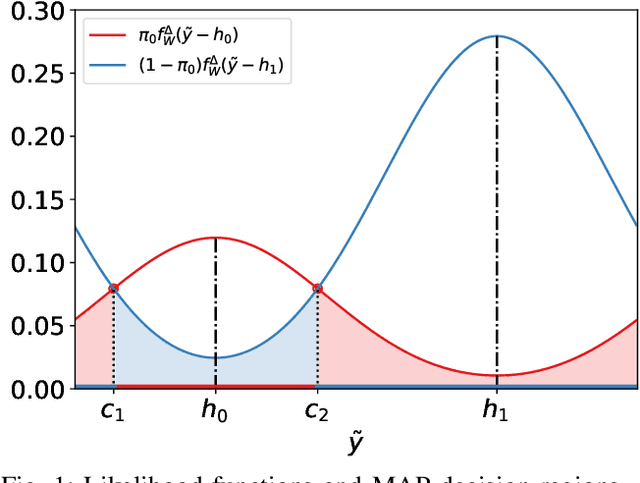
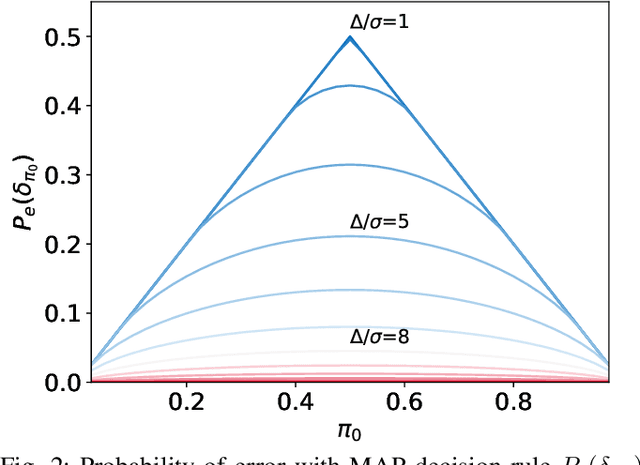
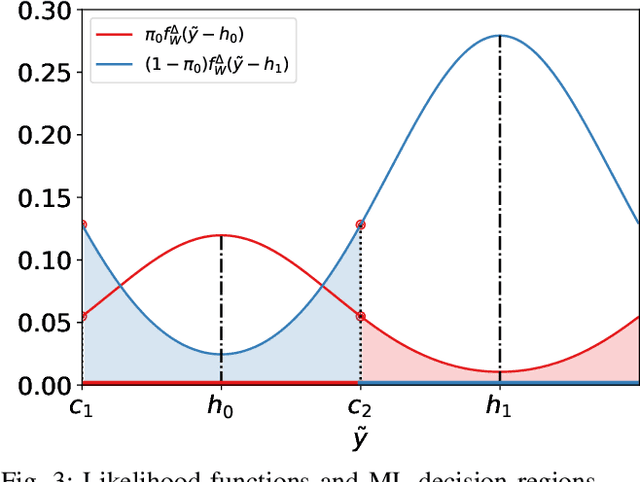
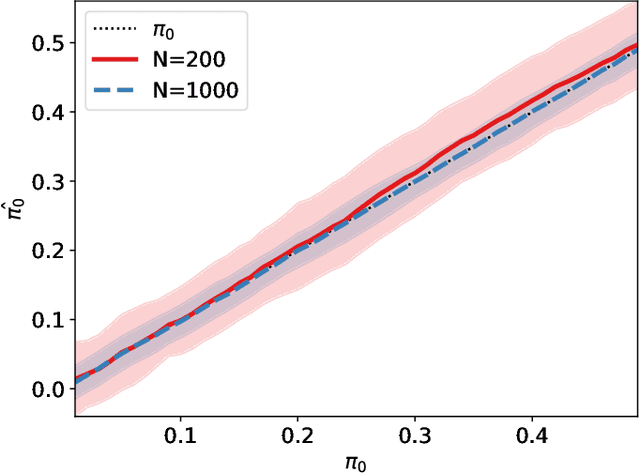
Modulo-wrapping receivers have attracted interest in several areas of digital communications, including precoding and lattice coding. The asymptotic capacity and error performance of the modulo AWGN channel have been well established. However, due to underlying assumptions of the asymptotic analyses, these findings might not always be realistic in physical world applications, which are often dimension- or delay-limited. In this work, the optimum ways to achieve minimum probability of error for binary signaling through a scalar modulo AWGN channel is examined under different scenarios where the receiver has access to full or partial information. In case of partial information at the receiver, an iterative estimation rule is proposed to reduce the error rate, and the performance of different estimators are demonstrated in simulated experiments.