 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty quantification for deeponets with ensemble kalman inversion
Mar 06, 2024In recent years, operator learning, particularly the DeepONet, has received much attention for efficiently learning complex mappings between input and output functions across diverse fields. However, in practical scenarios with limited and noisy data, accessing the uncertainty in DeepONet predictions becomes essential, especially in mission-critical or safety-critical applications. Existing methods, either computationally intensive or yielding unsatisfactory uncertainty quantification, leave room for developing efficient and informative uncertainty quantification (UQ) techniques tailored for DeepONets. In this work, we proposed a novel inference approach for efficient UQ for operator learning by harnessing the power of the Ensemble Kalman Inversion (EKI) approach. EKI, known for its derivative-free, noise-robust, and highly parallelizable feature, has demonstrated its advantages for UQ for physics-informed neural networks [28]. Our innovative application of EKI enables us to efficiently train ensembles of DeepONets while obtaining informative uncertainty estimates for the output of interest. We deploy a mini-batch variant of EKI to accommodate larger datasets, mitigating the computational demand due to large datasets during the training stage. Furthermore, we introduce a heuristic method to estimate the artificial dynamics covariance, thereby improving our uncertainty estimates. Finally, we demonstrate the effectiveness and versatility of our proposed methodology across various benchmark problems, showcasing its potential to address the pressing challenges of uncertainty quantification in DeepONets, especially for practical applications with limited and noisy data.
Efficient Bayesian Physics Informed Neural Networks for Inverse Problems via Ensemble Kalman Inversion
Mar 13, 2023Bayesian Physics Informed Neural Networks (B-PINNs) have gained significant attention for inferring physical parameters and learning the forward solutions for problems based on partial differential equations. However, the overparameterized nature of neural networks poses a computational challenge for high-dimensional posterior inference. Existing inference approaches, such as particle-based or variance inference methods, are either computationally expensive for high-dimensional posterior inference or provide unsatisfactory uncertainty estimates. In this paper, we present a new efficient inference algorithm for B-PINNs that uses Ensemble Kalman Inversion (EKI) for high-dimensional inference tasks. We find that our proposed method can achieve inference results with informative uncertainty estimates comparable to Hamiltonian Monte Carlo (HMC)-based B-PINNs with a much reduced computational cost. These findings suggest that our proposed approach has great potential for uncertainty quantification in physics-informed machine learning for practical applications.
Nonnegativity-Enforced Gaussian Process Regression
Apr 07, 2020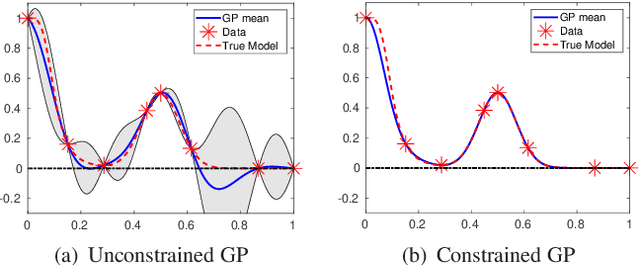
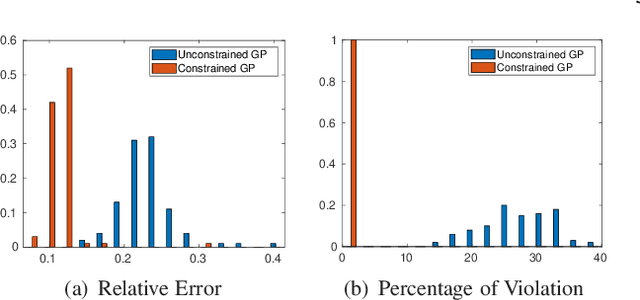
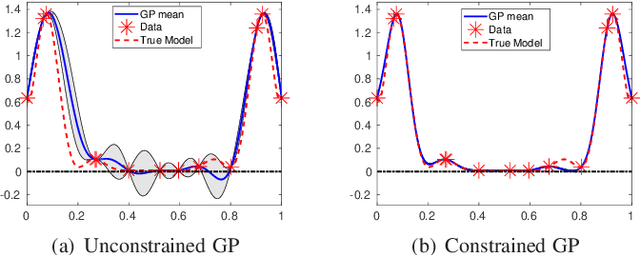
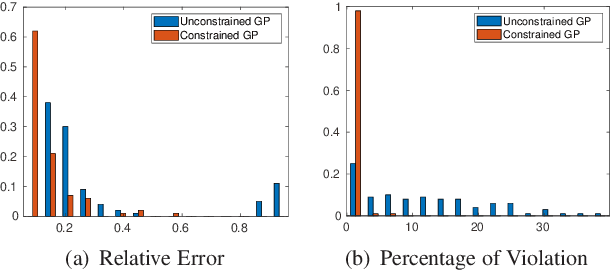
Gaussian Process (GP) regression is a flexible non-parametric approach to approximate complex models. In many cases, these models correspond to processes with bounded physical properties. Standard GP regression typically results in a proxy model which is unbounded for all temporal or spacial points, and thus leaves the possibility of taking on infeasible values. We propose an approach to enforce the physical constraints in a probabilistic way under the GP regression framework. In addition, this new approach reduces the variance in the resulting GP model.