Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Path Integral Control using Covariance Variable Importance Sampling
Oct 28, 2015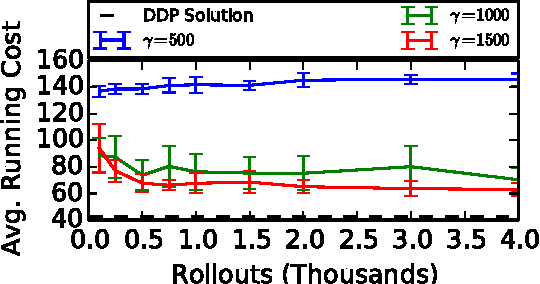
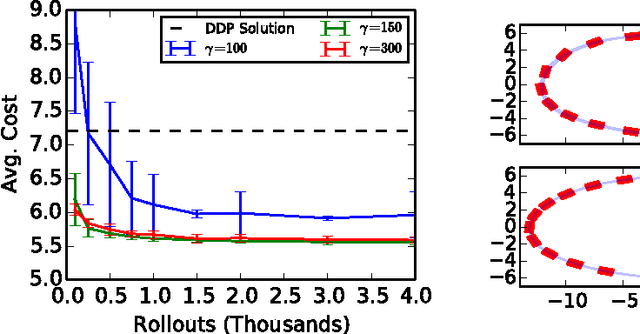
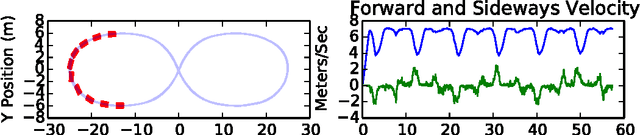
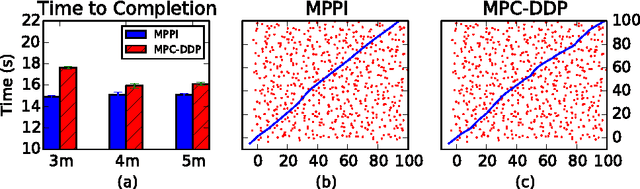
In this paper we develop a Model Predictive Path Integral (MPPI) control algorithm based on a generalized importance sampling scheme and perform parallel optimization via sampling using a Graphics Processing Unit (GPU). The proposed generalized importance sampling scheme allows for changes in the drift and diffusion terms of stochastic diffusion processes and plays a significant role in the performance of the model predictive control algorithm. We compare the proposed algorithm in simulation with a model predictive control version of differential dynamic programming.
* 8 pages
Via