 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing human bodies with extra robotic arms and fingers: The Neural Resource Allocation Problem
Mar 31, 2021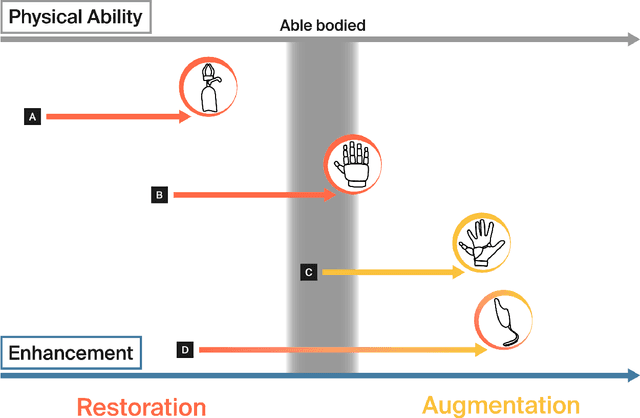
The emergence of robot-based body augmentation promises exciting innovations that will inform robotics, human-machine interaction, and wearable electronics. Even though augmentative devices like extra robotic arms and fingers in many ways build on restorative technologies, they introduce unique challenges for bidirectional human-machine collaboration. Can humans adapt and learn to operate a new limb collaboratively with their biological limbs without sacrificing their physical abilities? To successfully achieve robotic body augmentation, we need to ensure that by giving a person an additional (artificial) limb, we are not in fact trading off an existing (biological) one. In this manuscript, we introduce the "Neural Resource Allocation" problem, which distinguishes body augmentation from existing robotics paradigms such as teleoperation and prosthetics. We discuss how to allow the effective and effortless voluntary control of augmentative devices without compromising the voluntary control of the biological body. In reviewing the relevant literature on extra robotic fingers and limbs we critically assess the range of potential solutions available for the "Neural Resource Allocation" problem. For this purpose, we combine multiple perspectives from engineering and neuroscience with considerations from human-machine interaction, sensory-motor integration, ethics and law. Altogether we aim to define common foundations and operating principles for the successful implementation of motor augmentation.
Exploiting Implicit Kinematic Kernel for Controlling a Wearable Robotic Extra-finger
Dec 07, 2020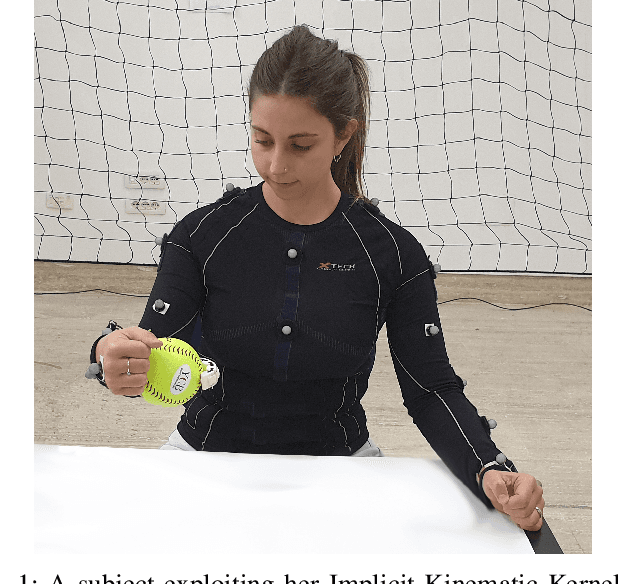


In the last decades, wearable robots have been proposed as technological aids for rehabilitation, assistance, and functional substitution for patients suffering from motor disorders and impairments. Robotic extra-limbs and extra-fingers are representative examples of the technological and scientific achievements in this field. However, successful and intuitive strategies to control and cooperate with the aforementioned wearable aids are still not well established. Against this background, this work introduces an innovative control strategy based on the exploitation of the residual motor capacity of impaired limbs. We aim at helping subjects with a limited mobility and/or physical impairments to control wearable extra-fingers in a natural, comfortable, and intuitive way. The novel idea here presented lies on taking advantage of the redundancy of the human kinematic chain involved in a task to control an extra degree of actuation (DoA). This concept is summarized in the definition of the Implicit Kinematic Kernel (IKK). As first investigation, we developed a procedure for the real time analysis of the body posture and the consequent computation of the IKK-based control signal in the case of single-arm tasks. We considered both bio-mechanical and physiological human features and constraints to allow for an efficient and intuitive control approach. Towards a complete evaluation of the proposed control system, we studied the users' capability of exploiting the Implicit Kinematic Kernel both in virtual and real environments, asking subjects to track different reference signals and to control a robotic extra-finger to accomplish pick-and-place tasks. Obtained results demonstrated that the proposed approach is suitable for controlling a wearable robotic extra-finger in a user-friendly way.