 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNondestructive chicken egg fertility detection using CNN-transfer learning algorithms
Sep 28, 2023This study explored the application of CNN-Transfer Learning for nondestructive chicken egg fertility detection for precision poultry hatchery practices. Four models, VGG16, ResNet50, InceptionNet, and MobileNet, were trained and evaluated on a dataset (200 single egg images) using augmented images (rotation, flip, scale, translation, and reflection). Although the training results demonstrated that all models achieved high accuracy, indicating their ability to accurately learn and classify chicken eggs' fertility state, when evaluated on the testing set, variations in accuracy and performance were observed. InceptionNet exhibited the best overall performance, accurately classifying fertile and non-fertile eggs. It demonstrated excellent performance in both training and testing sets in all parameters of the evaluation metrics. In testing set, it achieved an accuracy of 0.98, a sensitivity of 1 for detecting fertile eggs, and a specificity of 0.96 for identifying non-fertile eggs. The higher performance is attributed to its unique architecture efficiently capturing features at different scales leading to improved accuracy and robustness. Further optimization and fine-tuning of the models might necessary to address the limitations in accurately detecting fertile and non-fertile eggs in case of other models. This study highlighted the potential of CNN-Transfer Learning for nondestructive fertility detection and emphasizes the need for further research to enhance the models' capabilities and ensure accurate classification.
* 18 pages, 9 figures, 1 table, journal article published
Identification of chicken egg fertility using SVM classifier based on first-order statistical feature extraction
Jan 10, 2022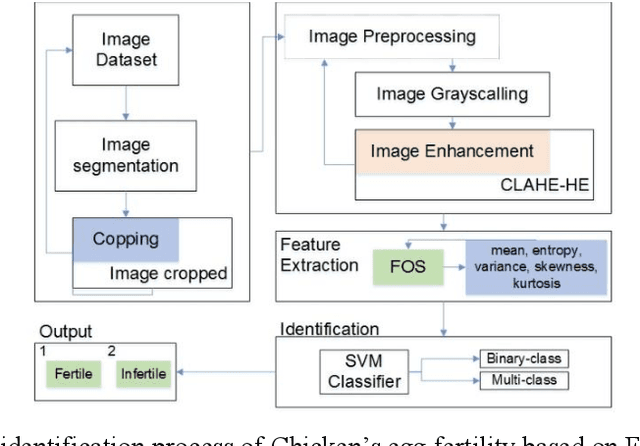
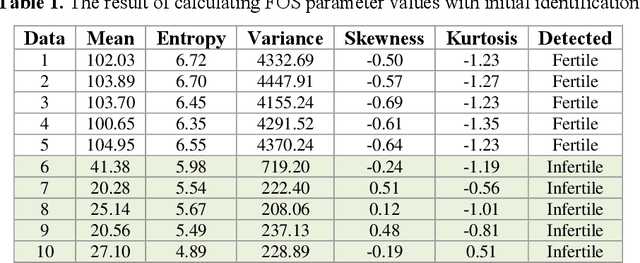
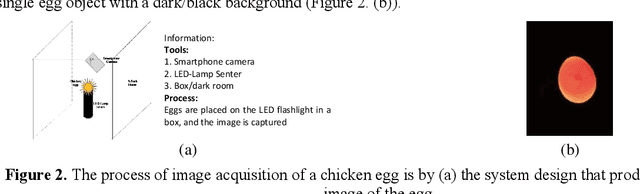
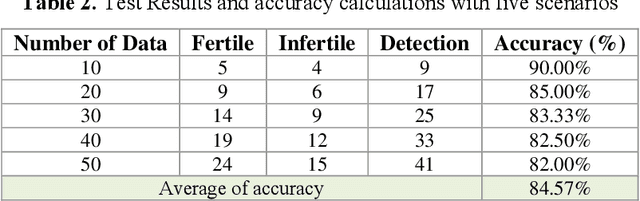
This study aims to identify chicken eggs fertility using the support vector machine (SVM) classifier method. The classification basis used the first-order statistical (FOS) parameters as feature extraction in the identification process. This research was developed based on the process's identification process, which is still manual (conventional). Although currently there are many technologies in the identification process, they still need development. Thus, this research is one of the developments in the field of image processing technology. The sample data uses datasets from previous studies with a total of 100 egg images. The egg object in the image is a single object. From these data, the classification of each fertile and infertile egg is 50 image data. Chicken egg image data became input in image processing, with the initial process is segmentation. This initial segmentation aims to get the cropped image according to the object. The cropped image is repaired using image preprocessing with grayscaling and image enhancement methods. This method (image enhancement) used two combination methods: contrast limited adaptive histogram equalization (CLAHE) and histogram equalization (HE). The improved image becomes the input for feature extraction using the FOS method. The FOS uses five parameters, namely mean, entropy, variance, skewness, and kurtosis. The five parameters entered into the SVM classifier method to identify the fertility of chicken eggs. The results of these experiments, the method proposed in the identification process has a success percentage of 84.57%. Thus, the implementation of this method can be used as a reference for future research improvements. In addition, it may be possible to use a second-order feature extraction method to improve its accuracy and improve supervised learning for classification.
* 9 Pages, 5 Figures, 2 Tables
Fish Detection Using Morphological Approach Based-on K-Means Segmentation
Jan 16, 2021

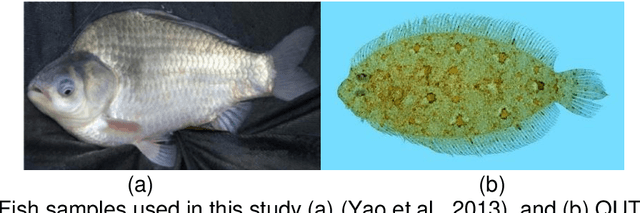

Image segmentation is a concept that is often used for object detection. This detection has difficulty detecting objects with backgrounds that have many colors and even have a color similar to the object being detected. This study aims to detect fish using segmentation, namely segmenting fish images using k-means clustering. The segmentation process is processed by improving the image first. The initial process is preprocessing to improve the image. Preprocessing is done twice, before segmentation using k-means and after. Preprocessing stage 1 using resize and reshape. Whereas after k-means is the contrast-limited adaptive histogram equalization. Preprocessing results are segmented using k-means clustering. The K-means concept classifies images using segments between the object and the background (using k = 8). The final step is the morphological process with open and close operations to obtain fish contours using black and white images based on grayscale images from color images. Based on the experimental results, the process can run well, with the ssim value close to 1, which means that image information does not change. Processed objects provide a clear picture of fish objects so that this k-means segmentation can help detect fish objects.