 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLO Ensemble for UAV-based Multispectral Defect Detection in Wind Turbine Components
Sep 04, 2025Unmanned aerial vehicles (UAVs) equipped with advanced sensors have opened up new opportunities for monitoring wind power plants, including blades, towers, and other critical components. However, reliable defect detection requires high-resolution data and efficient methods to process multispectral imagery. In this research, we aim to enhance defect detection accuracy through the development of an ensemble of YOLO-based deep learning models that integrate both visible and thermal channels. We propose an ensemble approach that integrates a general-purpose YOLOv8 model with a specialized thermal model, using a sophisticated bounding box fusion algorithm to combine their predictions. Our experiments show this approach achieves a mean Average Precision (mAP@.5) of 0.93 and an F1-score of 0.90, outperforming a standalone YOLOv8 model, which scored an mAP@.5 of 0.91. These findings demonstrate that combining multiple YOLO architectures with fused multispectral data provides a more reliable solution, improving the detection of both visual and thermal defects.
Thermal and RGB Images Work Better Together in Wind Turbine Damage Detection
Dec 05, 2024



The inspection of wind turbine blades (WTBs) is crucial for ensuring their structural integrity and operational efficiency. Traditional inspection methods can be dangerous and inefficient, prompting the use of unmanned aerial vehicles (UAVs) that access hard-to-reach areas and capture high-resolution imagery. In this study, we address the challenge of enhancing defect detection on WTBs by integrating thermal and RGB images obtained from UAVs. We propose a multispectral image composition method that combines thermal and RGB imagery through spatial coordinate transformation, key point detection, binary descriptor creation, and weighted image overlay. Using a benchmark dataset of WTB images annotated for defects, we evaluated several state-of-the-art object detection models. Our results show that composite images significantly improve defect detection efficiency. Specifically, the YOLOv8 model's accuracy increased from 91% to 95%, precision from 89% to 94%, recall from 85% to 92%, and F1-score from 87% to 93%. The number of false positives decreased from 6 to 3, and missed defects reduced from 5 to 2. These findings demonstrate that integrating thermal and RGB imagery enhances defect detection on WTBs, contributing to improved maintenance and reliability.
Dynamic Trajectory Adaptation for Efficient UAV Inspections of Wind Energy Units
Nov 26, 2024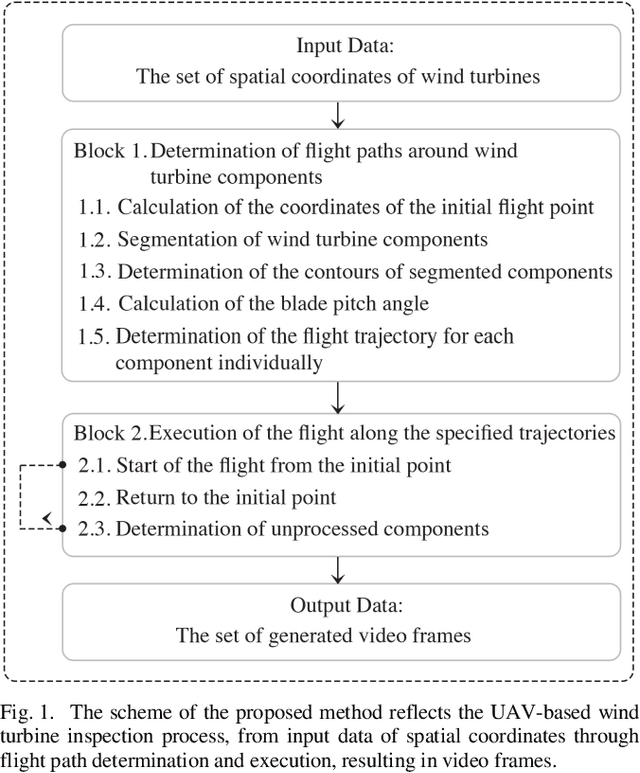
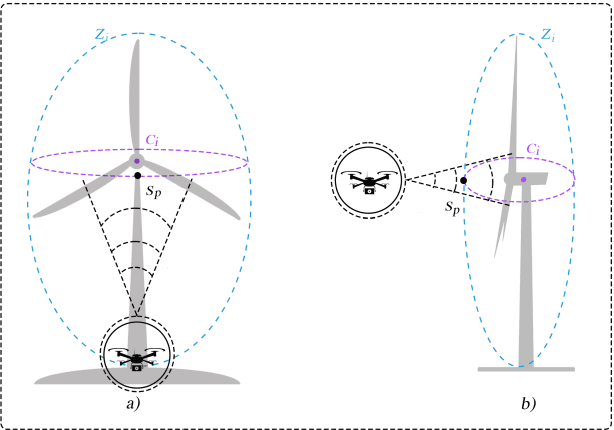
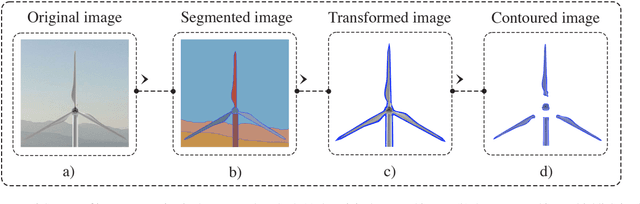
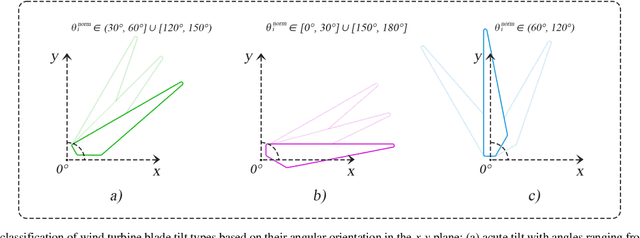
The research presents an automated method for determining the trajectory of an unmanned aerial vehicle (UAV) for wind turbine inspection. The proposed method enables efficient data collection from multiple wind installations using UAV optical sensors, considering the spatial positioning of blades and other components of the wind energy installation. It includes component segmentation of the wind energy unit (WEU), determination of the blade pitch angle, and generation of optimal flight trajectories, considering safe distances and optimal viewing angles. The results of computational experiments have demonstrated the advantage of the proposed method in monitoring WEU, achieving a 78% reduction in inspection time, a 17% decrease in total trajectory length, and a 6% increase in average blade surface coverage compared to traditional methods. Furthermore, the process minimizes the average deviation from the optimal trajectory by 68%, indicating its high accuracy and ability to compensate for external influences.