 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Trajectory Adaptation for Efficient UAV Inspections of Wind Energy Units
Paper and Code
Nov 26, 2024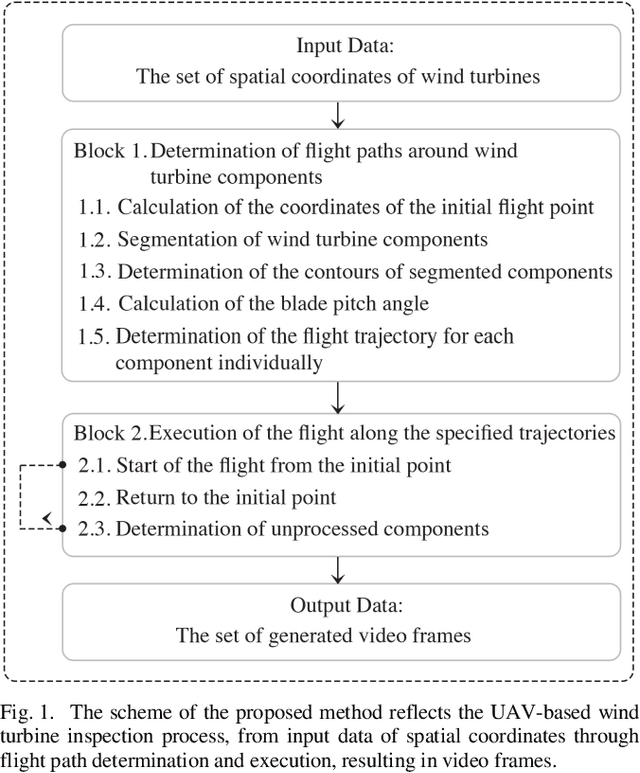
The research presents an automated method for determining the trajectory of an unmanned aerial vehicle (UAV) for wind turbine inspection. The proposed method enables efficient data collection from multiple wind installations using UAV optical sensors, considering the spatial positioning of blades and other components of the wind energy installation. It includes component segmentation of the wind energy unit (WEU), determination of the blade pitch angle, and generation of optimal flight trajectories, considering safe distances and optimal viewing angles. The results of computational experiments have demonstrated the advantage of the proposed method in monitoring WEU, achieving a 78% reduction in inspection time, a 17% decrease in total trajectory length, and a 6% increase in average blade surface coverage compared to traditional methods. Furthermore, the process minimizes the average deviation from the optimal trajectory by 68%, indicating its high accuracy and ability to compensate for external influences.