 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA generalized Bayes framework for probabilistic clustering
Jun 09, 2020

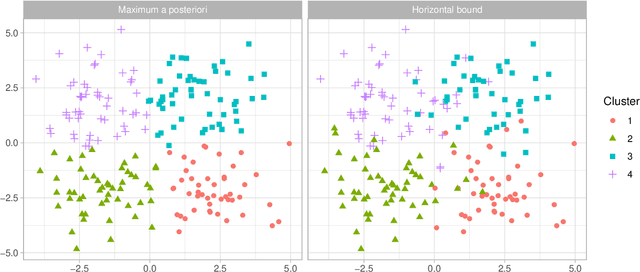
Loss-based clustering methods, such as k-means and its variants, are standard tools for finding groups in data. However, the lack of quantification of uncertainty in the estimated clusters is a disadvantage. Model-based clustering based on mixture models provides an alternative, but such methods face computational problems and large sensitivity to the choice of kernel. This article proposes a generalized Bayes framework that bridges between these two paradigms through the use of Gibbs posteriors. In conducting Bayesian updating, the log likelihood is replaced by a loss function for clustering, leading to a rich family of clustering methods. The Gibbs posterior represents a coherent updating of Bayesian beliefs without needing to specify a likelihood for the data, and can be used for characterizing uncertainty in clustering. We consider losses based on Bregman divergence and pairwise similarities, and develop efficient deterministic algorithms for point estimation along with sampling algorithms for uncertainty quantification. Several existing clustering algorithms, including k-means, can be interpreted as generalized Bayes estimators under our framework, and hence we provide a method of uncertainty quantification for these approaches.