 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Dark Knowledge: Mixup-Based Distillation for Reliable Predictions
Jun 10, 2026Knowledge Distillation (KD) and mixup have proven effective at inducing smoothness in class boundaries; KD captures inherent class relationships in probability distributions, and mixup enforces them through convex combinations of inputs. Their interaction, however, remains poorly understood, particularly when mixup is applied only during student training. In this setting, the teacher is queried on inputs drawn from a vicinal distribution it never saw during training, a controlled mismatch whose effect on knowledge transfer has not been characterised. We show that this mismatch causes the teacher's supervisory signal to be dominated by distributional confusion rather than inter-class structure. Despite it, the student does not merely imitate the teacher: it independently acquires greater linearity in the vicinal region, a structural property that the teacher lacks, and goes beyond dark-knowledge transfer. KD with mixup consistently improves student accuracy and reduces overconfidence by an order of magnitude relative to the baseline, across CIFAR and ImageNet with varying-capacity teachers. Crucially, calibration propagates from teacher to student independently of accuracy transfer, and temperature scaling governs a measurable accuracy-calibration trade-off that becomes more pronounced under vicinal training. These results reframe mixup distillation not as a degraded version of standard KD, but as a richer transfer channel that simultaneously shapes discriminative performance, uncertainty estimation, and representational geometry.
Mamba base PKD for efficient knowledge compression
Mar 03, 2025Deep neural networks (DNNs) have remarkably succeeded in various image processing tasks. However, their large size and computational complexity present significant challenges for deploying them in resource-constrained environments. This paper presents an innovative approach for integrating Mamba Architecture within a Progressive Knowledge Distillation (PKD) process to address the challenge of reducing model complexity while maintaining accuracy in image classification tasks. The proposed framework distills a large teacher model into progressively smaller student models, designed using Mamba blocks. Each student model is trained using Selective-State-Space Models (S-SSM) within the Mamba blocks, focusing on important input aspects while reducing computational complexity. The work's preliminary experiments use MNIST and CIFAR-10 as datasets to demonstrate the effectiveness of this approach. For MNIST, the teacher model achieves 98% accuracy. A set of seven student models as a group retained 63% of the teacher's FLOPs, approximating the teacher's performance with 98% accuracy. The weak student used only 1% of the teacher's FLOPs and maintained 72% accuracy. Similarly, for CIFAR-10, the students achieved 1% less accuracy compared to the teacher, with the small student retaining 5% of the teacher's FLOPs to achieve 50% accuracy. These results confirm the flexibility and scalability of Mamba Architecture, which can be integrated into PKD, succeeding in the process of finding students as weak learners. The framework provides a solution for deploying complex neural networks in real-time applications with a reduction in computational cost.
Knowledge Distillation Neural Network for Predicting Car-following Behaviour of Human-driven and Autonomous Vehicles
Nov 08, 2024



As we move towards a mixed-traffic scenario of Autonomous vehicles (AVs) and Human-driven vehicles (HDVs), understanding the car-following behaviour is important to improve traffic efficiency and road safety. Using a real-world trajectory dataset, this study uses descriptive and statistical analysis to investigate the car-following behaviours of three vehicle pairs: HDV-AV, AV-HDV and HDV-HDV in mixed traffic. The ANOVA test showed that car-following behaviours across different vehicle pairs are statistically significant (p-value < 0.05). We also introduce a data-driven Knowledge Distillation Neural Network (KDNN) model for predicting car-following behaviour in terms of speed. The KDNN model demonstrates comparable predictive accuracy to its teacher network, a Long Short-Term Memory (LSTM) network, and outperforms both the standalone student network, a Multilayer Perceptron (MLP), and traditional physics-based models like the Gipps model. Notably, the KDNN model better prevents collisions, measured by minimum Time-to-Collision (TTC), and operates with lower computational power, making it ideal for AVs or driving simulators requiring efficient computing.
Exploring Machine Learning Techniques to Identify Important Factors Leading to Injury in Curve Related Crashes
Jan 04, 2023Different factors have effects on traffic crashes and crash-related injuries. These factors include segment characteristics, crash-level characteristics, occupant level characteristics, environment characteristics, and vehicle level characteristics. There are several studies regarding these factors' effects on crash injuries. However, limited studies have examined the effects of pre-crash events on injuries, especially for curve-related crashes. The majority of previous studies for curve-related crashes focused on the impact of geometric features or street design factors. The current study tries to eliminate the aforementioned shortcomings by considering important pre-crash events related factors as selected variables and the number of vehicles with or without injury as the predicted variable. This research used CRSS data from the National Highway Traffic Safety Administration (NHTSA), which includes traffic crash-related data for different states in the USA. The relationships are explored using different machine learning algorithms like the random forest, C5.0, CHAID, Bayesian Network, Neural Network, C\&R Tree, Quest, etc. The random forest and SHAP values are used to identify the most effective variables. The C5.0 algorithm, which has the highest accuracy rate among the other algorithms, is used to develop the final model. Analysis results revealed that the extent of the damage, critical pre-crash event, pre-impact location, the trafficway description, roadway surface condition, the month of the crash, the first harmful event, number of motor vehicles, attempted avoidance maneuver, and roadway grade affect the number of vehicles with or without injury in curve-related crashes.
CDR Based Trajectories: Tentative for Filtering Ping-pong Handover
May 05, 2021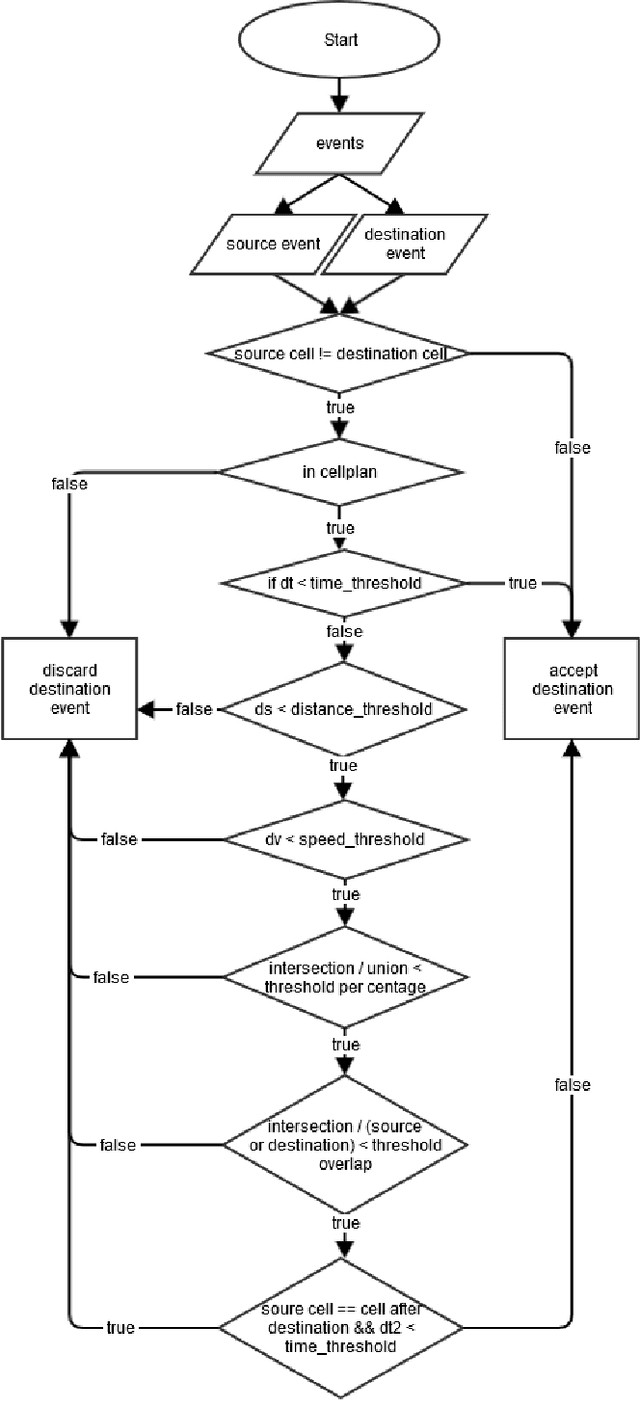
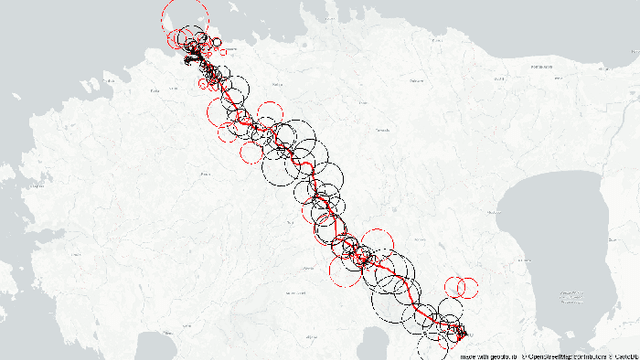


Call Detail Records (CDRs) coupled with the coverage area locations provide the operator with an incredible amount of information on its customers' whereabouts and movement. Due to the non-static and overlapping nature of the antenna coverage area there commonly exist situations where cellphones geographically close to each other can be connected to different antennas due to handover rule - the operator hands over a certain cellphone to another antenna to spread the load between antennas. Hence, this aspect introduces a ping-pong handover phenomena in the trajectories extracted from the CDR data which can be misleading in understanding the mobility pattern. To reconstruct accurate trajectories it is a must to reduce the number of those handovers appearing in the dataset. This letter presents a novel approach for filtering ping-pong handovers from CDR based trajectories. Primarily, the approach is based on anchors model utilizing different features and parameters extracted from the coverage areas and reconstructed trajectories mined from the CDR data. Using this methodology we can significantly reduce the ping-pong handover noise in the trajectories, which gives a more accurate reconstruction of the customers' movement pattern.
Evaluation of the Robustness of Visual SLAM Methods in Different Environments
Sep 11, 2020



Determining the position and orientation of a sensor vis-a-vis its surrounding, while simultaneously mapping the environment around that sensor or simultaneous localization and mapping is quickly becoming an important advancement in embedded vision with a large number of different possible applications. This paper presents a comprehensive comparison of the latest open-source SLAM algorithms with the main focus being their performance in different environmental surroundings. The chosen algorithms are evaluated on common publicly available datasets and the results reasoned with respect to the datasets' environment. This is the first stage of our main target of testing the methods in off-road scenarios.
Neural Networks Model for Travel Time Prediction Based on ODTravel Time Matrix
Apr 08, 2020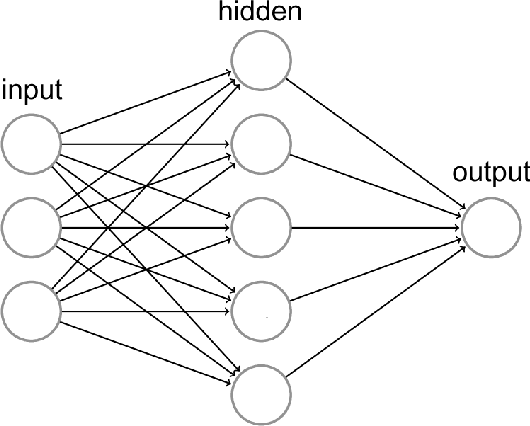
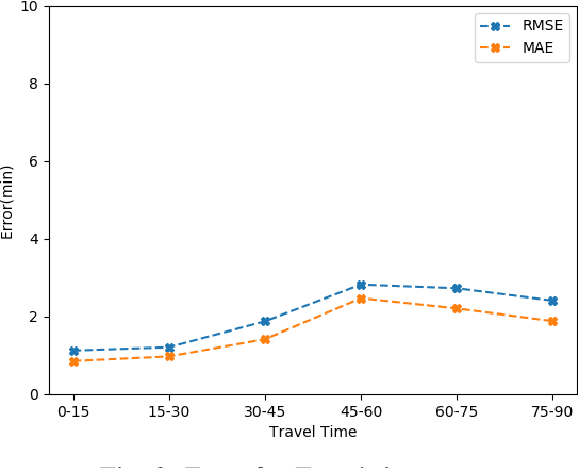
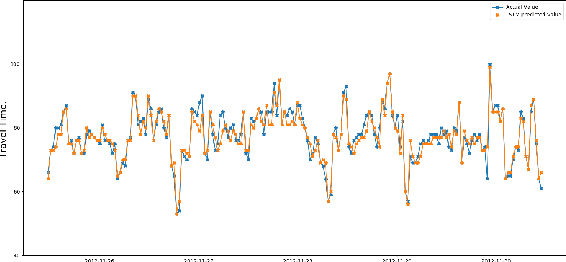
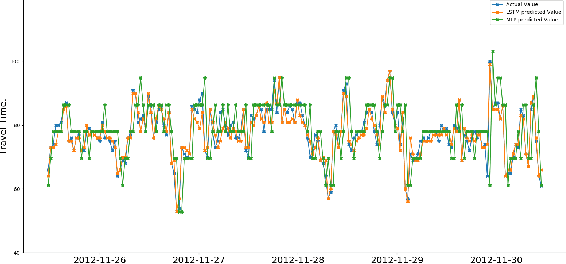
Public transportation system commuters are often interested in getting accurate travel time information to plan their daily activities. However, this information is often difficult to predict accurately due to the irregularities of road traffic, caused by factors such as weather conditions, road accidents, and traffic jams. In this study, two neural network models namely multi-layer(MLP) perceptron and long short-term model(LSTM) are developed for predicting link travel time of a busy route with input generated using Origin-Destination travel time matrix derived from a historical GPS dataset. The experiment result showed that both models can make near-accurate predictions however, LSTM is more susceptible to noise as time step increases.