 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobilityGPT: Enhanced Human Mobility Modeling with a GPT model
Feb 05, 2024



Generative models have shown promising results in capturing human mobility characteristics and generating synthetic trajectories. However, it remains challenging to ensure that the generated geospatial mobility data is semantically realistic, including consistent location sequences, and reflects real-world characteristics, such as constraining on geospatial limits. To address these issues, we reformat human mobility modeling as an autoregressive generation task, leveraging Generative Pre-trained Transformer (GPT). To ensure its controllable generation to alleviate the above challenges, we propose a geospatially-aware generative model, MobilityGPT. We propose a gravity-based sampling method to train a transformer for semantic sequence similarity. Then, we constrained the training process via a road connectivity matrix that provides the connectivity of sequences in trajectory generation, thereby keeping generated trajectories in geospatial limits. Lastly, we constructed a Reinforcement Learning from Trajectory Feedback (RLTF) to minimize the travel distance between training and the synthetically generated trajectories. Our experiments on real-world datasets demonstrate that MobilityGPT outperforms state-of-the-art methods in generating high-quality mobility trajectories that are closest to real data in terms of origin-destination similarity, trip length, travel radius, link, and gravity distributions.
Deep Reinforcement Learning for Intelligent Transportation Systems: A Survey
May 02, 2020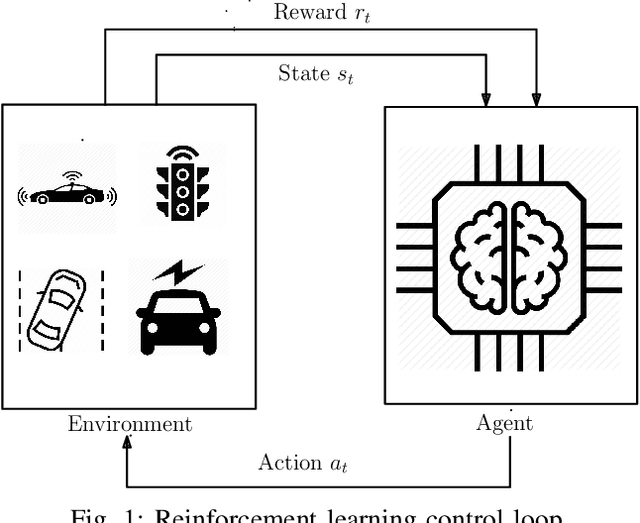
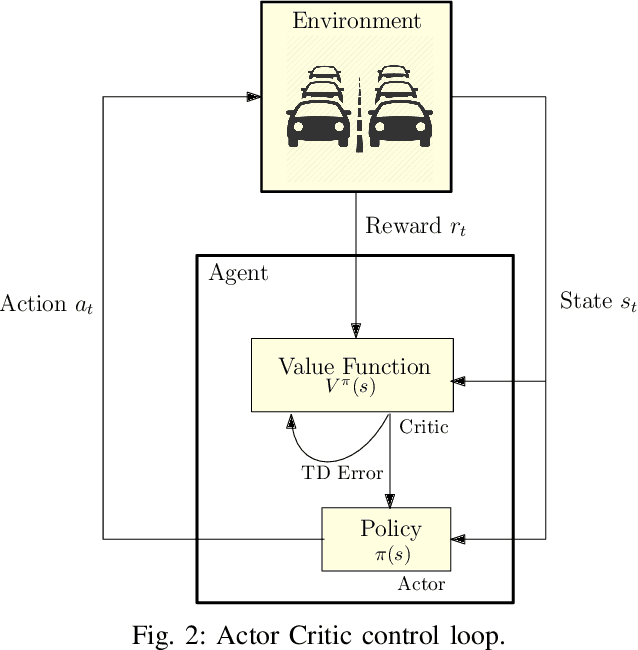
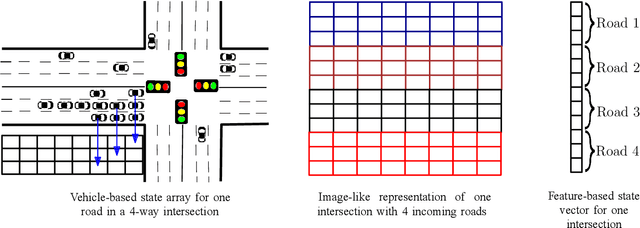

Latest technological improvements increased the quality of transportation. New data-driven approaches bring out a new research direction for all control-based systems, e.g., in transportation, robotics, IoT and power systems. Combining data-driven applications with transportation systems plays a key role in recent transportation applications. In this paper, the latest deep reinforcement learning (RL) based traffic control applications are surveyed. Specifically, traffic signal control (TSC) applications based on (deep) RL, which have been studied extensively in the literature, are discussed in detail. Different problem formulations, RL parameters, and simulation environments for TSC are discussed comprehensively. In the literature, there are also several autonomous driving applications studied with deep RL models. Our survey extensively summarizes existing works in this field by categorizing them with respect to application types, control models and studied algorithms. In the end, we discuss the challenges and open questions regarding deep RL-based transportation applications.