 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFSM: FBS Set Management, An energy efficient multi-drone 3D trajectory approach in cellular networks
Feb 08, 2022

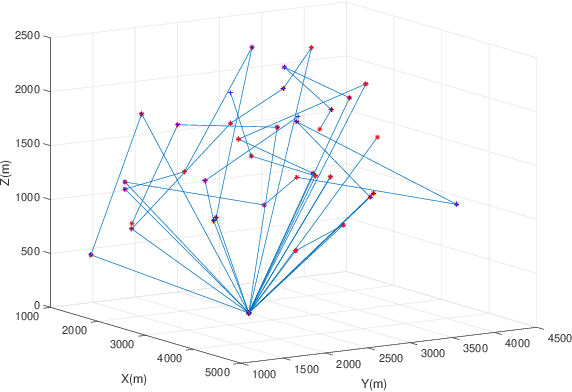
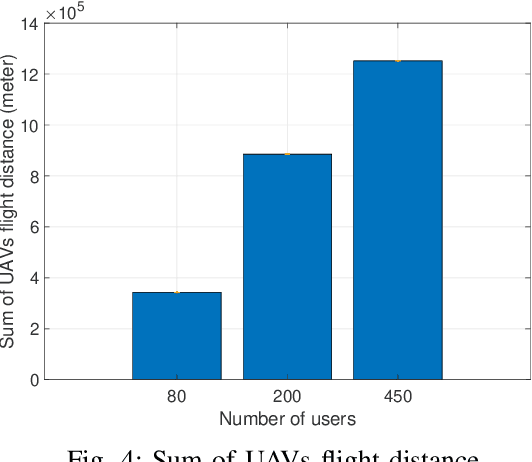
In this paper, we consider a cellular network demand in an urban area. We aim to cover users and serve their required data rate in a period of time using a 5G cellular network. The type of considered UAV in this scenario is The Scout B- 330 UAV helicopter which can fly up to 3 km height. In these scenarios, to find the most proper trajectory of UAVs, we first must find the best positions of UAVs in different snapshots. We consider orthogonal frequency reuse to avoid interference between UAVs in the network. We also consider the number of communication channels constraint in intra cellular network. To find the optimum position of UAVs in each snapshot. We consider Non-Line of Sight (NLoS) path loss in these scenarios and aim to cover all users in each snapshot. To find the optimum trajectory of UAVs, we propose a mathematical model based on transportation problem to minimize the total distance tracked by UAVs. In each step we solve the proposed mathematical model for transiting UAVs between two snapshots. We also consider that users can be placed in different altitudes an their positions follows the Poison Point Process distribution and their mobility follows the random way point. The UAVs battery and flight limitations are also considered. To tackle the energy problem we introduce the Drone Cell Off (DCO) approach to avoid losing energy in idle hover mode.
Joint position and trajectory optimization of flying base station in 5G cellular networks, based on users' current and predicted location
Feb 08, 2022



Nowadays, Unmanned Aerial Vehicles (UAVs) have been significantly improved, and one of their most important applications is to provide temporary coverage for cellular users. Static Base Station cannot service all users due to temporary crashes because of temporary events such as ground BS breakdowns, bad weather conditions, natural disasters, transmission errors, etc., drones equipped with small cellular BS. The Drone Base Station is immediately sent to the target location and establishes the necessary communication links without requiring any predetermined infrastructure and covers that area. Finding the optimal location and the appropriate number (DBS) of drone-BS in this area is a challenge. Therefore, in this paper, the optimal location and optimal number of DBSs are distributed in the current state of the users and the subsequent user states determined by the prediction. Finally, the DBS transition is optimized from the current state to the predicted future locations. The simulation results show that the proposed method can provide acceptable coverage on the network.
TRLG: Fragile blind quad watermarking for image tamper detection and recovery by providing compact digests with quality optimized using LWT and GA
Mar 07, 2018



In this paper, an efficient fragile blind quad watermarking scheme for image tamper detection and recovery based on lifting wavelet transform and genetic algorithm is proposed. TRLG generates four compact digests with super quality based on lifting wavelet transform and halftoning technique by distinguishing the types of image blocks. In other words, for each 2*2 non-overlap blocks, four chances for recovering destroyed blocks are considered. A special parameter estimation technique based on genetic algorithm is performed to improve and optimize the quality of digests and watermarked image. Furthermore, CCS map is used to determine the mapping block for embedding information, encrypting and confusing the embedded information. In order to improve the recovery rate, Mirror-aside and Partner-block are proposed. The experiments that have been conducted to evaluate the performance of TRLG proved the superiority in terms of quality of the watermarked and recovered image, tamper localization and security compared with state-of-the-art methods. The results indicate that the PSNR and SSIM of the watermarked image are about 46 dB and approximately one, respectively. Also, the mean of PSNR and SSIM of several recovered images which has been destroyed about 90% is reached to 24 dB and 0.86, respectively.