 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFault Detection and Diagnosis with Imbalanced and Noisy Data: A Hybrid Framework for Rotating Machinery
Feb 09, 2022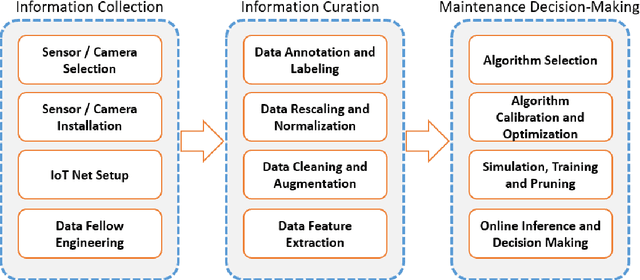
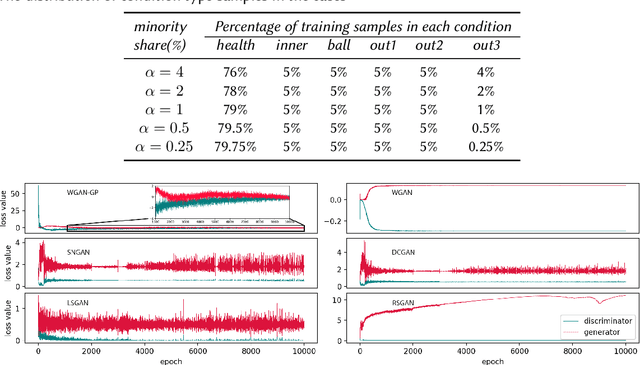
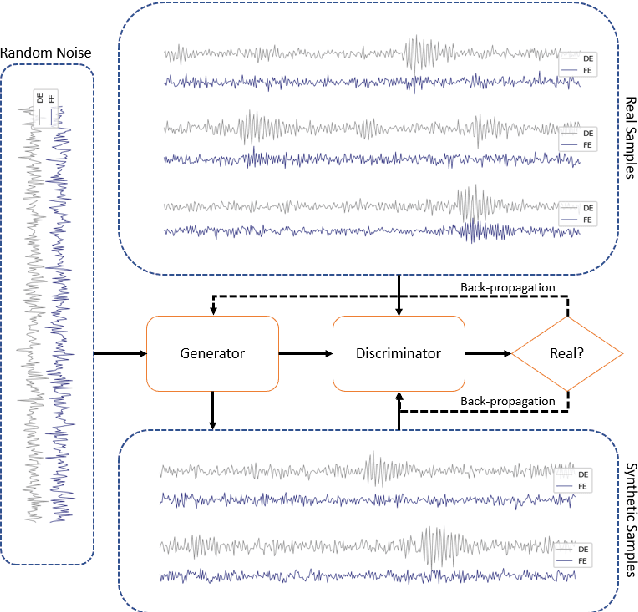
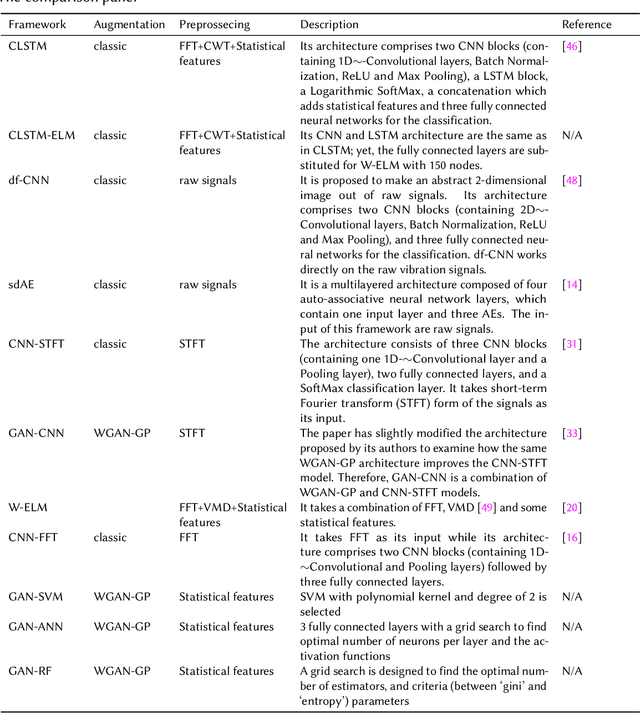
Fault diagnosis plays an essential role in reducing the maintenance costs of rotating machinery manufacturing systems. In many real applications of fault detection and diagnosis, data tend to be imbalanced, meaning that the number of samples for some fault classes is much less than the normal data samples. At the same time, in an industrial condition, accelerometers encounter high levels of disruptive signals and the collected samples turn out to be heavily noisy. As a consequence, many traditional Fault Detection and Diagnosis (FDD) frameworks get poor classification performances when dealing with real-world circumstances. Three main solutions have been proposed in the literature to cope with this problem: (1) the implementation of generative algorithms to increase the amount of under-represented input samples, (2) the employment of a classifier being powerful to learn from imbalanced and noisy data, (3) the development of an efficient data pre-processing including feature extraction and data augmentation. This paper proposes a hybrid framework which uses the three aforementioned components to achieve an effective signal-based FDD system for imbalanced conditions. Specifically, it first extracts the fault features, using Fourier and wavelet transforms to make full use of the signals. Then, it employs Wasserstein Generative Adversarial Networks (WGAN) to generate synthetic samples to populate the rare fault class and enhance the training set. Moreover, to achieve a higher performance a novel combination of Convolutional Long Short-term Memory (CLSTM) and Weighted Extreme Learning Machine (WELM) is proposed. To verify the effectiveness of the developed framework, different datasets settings on different imbalance severities and noise degrees were used. The comparative results demonstrate that in different scenarios GAN-CLSTM-ELM outperforms the other state-of-the-art FDD frameworks.
Automatic Visual Inspection of Rare Defects: A Framework based on GP-WGAN and Enhanced Faster R-CNN
May 02, 2021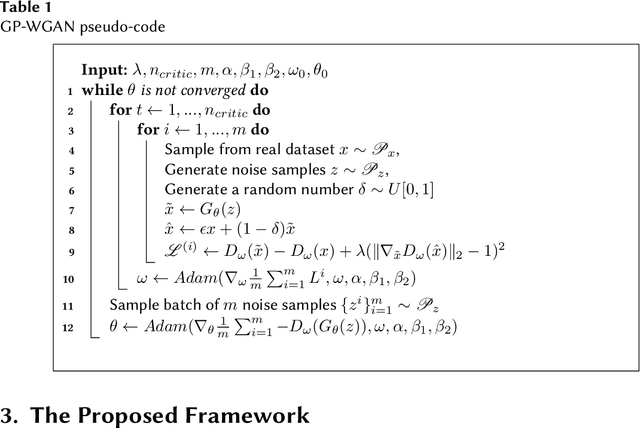
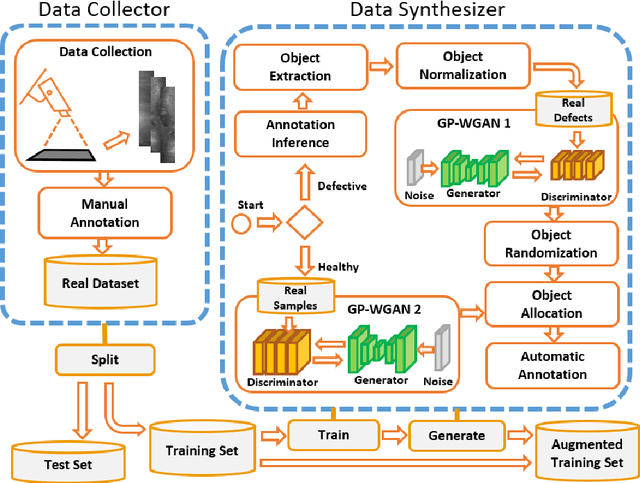
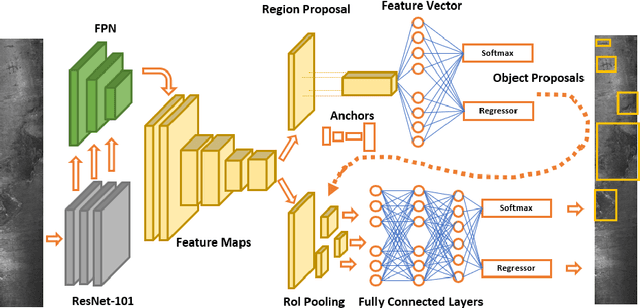
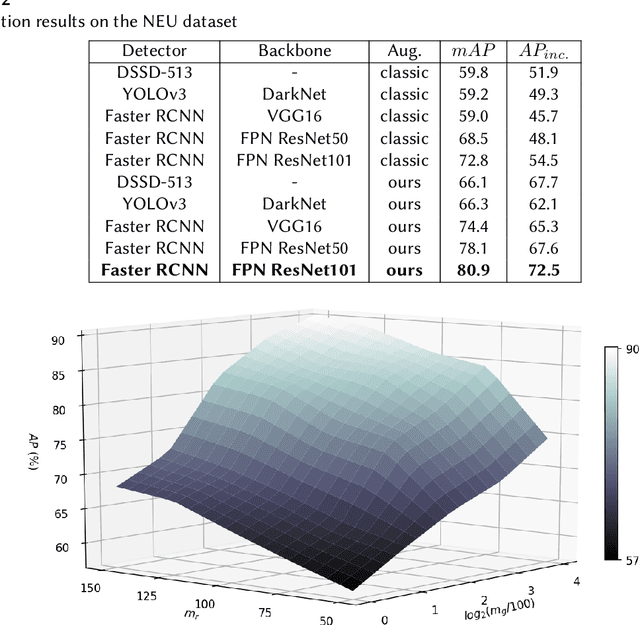
A current trend in industries such as semiconductors and foundry is to shift their visual inspection processes to Automatic Visual Inspection (AVI) systems, to reduce their costs, mistakes, and dependency on human experts. This paper proposes a two-staged fault diagnosis framework for AVI systems. In the first stage, a generation model is designed to synthesize new samples based on real samples. The proposed augmentation algorithm extracts objects from the real samples and blends them randomly, to generate new samples and enhance the performance of the image processor. In the second stage, an improved deep learning architecture based on Faster R-CNN, Feature Pyramid Network (FPN), and a Residual Network is proposed to perform object detection on the enhanced dataset. The performance of the algorithm is validated and evaluated on two multi-class datasets. The experimental results performed over a range of imbalance severities demonstrate the superiority of the proposed framework compared to other solutions.